



Get started learning to build your own electronics by following our FREE online courses below!
Learn More »
Categories
- animatronics (12)
- apple (11)
- arduino (179)
- art (41)
- articles (121)
- artificial intelligence (11)
- automation (421)
- avr (205)
- bitcoin (3)
- breadboard (9)
- cameras (57)
- cars (26)
- cell phones (28)
- clothing mods (21)
- console mods (26)
- dangerous (94)
- desktop mods (24)
- embedded (5)
- flying things (54)
- fpga (22)
- gaming creations (108)
- interface (225)
- internet (17)
- laptop mods (6)
- lasers (22)
- linux (7)
- magnetic (3)
- medical (12)
- microcontrollers (51)
- misc projects (152)
- msp (12)
- music (124)
- pic (90)
- projects (23)
- pyroedu (76)
- raspberry pi (26)
- robots (312)
- security (36)
- sensors (307)
- software (200)
- solar (19)
- stamp (9)
- tools (149)
- tutorials (98)
- Uncategorized (45)
- usb (44)
- wireless (256)
Sponsors
Build Like A Pyro!
Find many of the parts used on this site at our favorite online electronics shop


Quadcopter (From The Robot Fish)
Posted April 23, 2013 by Chris
“This amazing looking device is a quadcopter that was designed by me and my team at the University of Victoria….The purpose of the project was to create a DIY quadcopter for under $200 and push the limits of what the 3D printer in our laboratory can do.”

Cheap Robotic Microhelicopter HOWTO
Posted April 12, 2013 by Chris
“RC model helicopter prices have reached a point where all sorts of challenging (i.e. crash-prone) robotics projects become affordable. This document explains how to build a 300 g helicopter with embedded Linux and Bluetooth datalink from off-the shelf components for less than 500 EUR.”

Arduino Quadcopter Build Log
Posted March 16, 2013 by Chris
“Received the parts a couple of days ago and since then have assembled the quad in what little time I had away from work. I’m going to run through the physical build process in this post and give a detailed rundown of every part that was used.”

Quadcopter Control Board
Posted January 21, 2013 by Chris
“I used the standard version of Eagle to create a four-layer board with internal ground and power planes. The board carries an LPC1343 microprocessor which takes input from an onboard sensor stick containing accelerometer, compass, and gyro chips. After some sensor fusion and optionally in response to joystick input, the board provides PWM signals to four brushless DC motor controllers at a rate of 200Hz.”
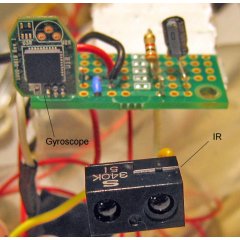
Microcontroller Based Autonomous Blimp
Posted January 6, 2013 by Chris
“Our project controls a propeller-driven toy blimp; it keeps the blimp moving in a straight line if its path is clear, and otherwise navigates it around obstacles in its path. To accomplish the former task, our circuit uses a gyroscope to detect horizontal rotation and compensates for it by adjusting the propeller speed. Obstacle detection is performed using a digital infrared proximity sensor.”
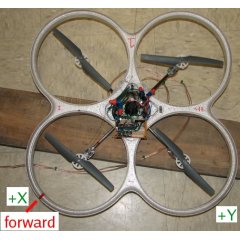
4-Rotor Flying Robot
Posted December 26, 2012 by Chris
“The OU 4-rotor flying robot is based on the Silverlit XUFO. We have added an Atmel Mega8 microcontroller equipped with a Devantech compass. This microcontroller overrides the RF receiver of the XUFO and provides its own pulse-width-modulated control signal. Because we insert this signal immediately after the RF stage, the functionality of the XUFO gyroscope is left intact.”
Buildling An Optical Flow Sensor (Arduino + CdS + Shoebox)
Posted September 29, 2012 by Chris
“This device is no match for an Randy’s sensor, but it does (minimally) work. Think of this little project as a fun hack more than anything else. But with some tweaking and size reduction someone could probably implement an occasionally working altitude hold sensor for a fixed-wing RC aircraft.”

A Quick Look At Some Quadcopter Hardware
Posted July 7, 2012 by Chris
“Now the hardware for my Quadcopter and a good portion of the software is complete for the quadcopter. The hardware really consists of 4 parts: The controller board, the quadcopter XBee board, the USB XBee board and the quadcopter frame with motors and ESCs.”

Mikrokopter Octocopter Build Up
Posted April 7, 2012 by Chris
“A good friend of mine, Corey, who lives on the other side of the pond (the US) asked me if I wanted to help building a Mikrokopter Octocopter kit he recently purchased. I accepted right away. It’s not every day you get to build a 2000 dollar multi-rotor platform and compare it to your own 100 dollar platform.”
High Altitude Balloon Transmitter
Posted March 12, 2012 by Chris
“A small group of high school students launched a high-altitude weather balloon with a small payload. In addition to a video transmitter and GPS transmitter, they decided to include a simple transmitter built from scratch. This is the story of the project, with emphasis on the simple transmitter’s design, construction, implementation, and reception (which surprised me, being detected ~200 miles away and lasting the entire duration of the flight!)”
Currently Hot
The Music Equalizer Display
make your own music equalizer display with a pic
L298 DC Motor Control
control a dc motor with the l298 (l298hn)
The Stunning Camera
shock your friends when they take your picture
A Simple File Server
make a file server on your pc
A Simple VHDL Counter
create a simple counter using vhdl with a cpld
Animatronics

Recent Articles
Arduino DDS Shield
build your own arduino based analog signal generator
A Digital Multimeter In Review (Tenma 72-7735)
learn about your typical digital multimeter in review
The PIC Annoy PCB
build something to annoy your co-workers
Automate Your Life With Cron
learn how to use cron for computer automation
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Motor Control via Infrared Distance Sensor
control a motor simply by waving your hand

