



Get started learning to build your own electronics by following our FREE online courses below!
Learn More »
Categories
- animatronics (12)
- apple (11)
- arduino (179)
- art (41)
- articles (121)
- artificial intelligence (11)
- automation (421)
- avr (205)
- bitcoin (3)
- breadboard (9)
- cameras (57)
- cars (26)
- cell phones (28)
- clothing mods (21)
- console mods (26)
- dangerous (94)
- desktop mods (24)
- embedded (5)
- flying things (54)
- fpga (22)
- gaming creations (108)
- interface (225)
- internet (17)
- laptop mods (6)
- lasers (22)
- linux (7)
- magnetic (3)
- medical (12)
- microcontrollers (51)
- misc projects (152)
- msp (12)
- music (124)
- pic (90)
- projects (23)
- pyroedu (76)
- raspberry pi (26)
- robots (312)
- security (36)
- sensors (307)
- software (200)
- solar (19)
- stamp (9)
- tools (149)
- tutorials (98)
- Uncategorized (45)
- usb (44)
- wireless (256)
Sponsors
Build Like A Pyro!
Find many of the parts used on this site at our favorite online electronics shop


PongSat – Real ‘SpaceBalls’
Posted March 7, 2012 by Chris
“A PongSat is an experiment that fits inside of a ping pong ball. These ping pong ball ‘satellites’ are flown to the edge of space by balloon or launched in sounding rockets. The PongSats are then returned to the student. It’s an easy and inexpensive way to get students excited about science and engineering. There are endless possibilities for experiments that can fit inside a ping pong ball. PongSat’s can be as simple or complex as you want them to be.”
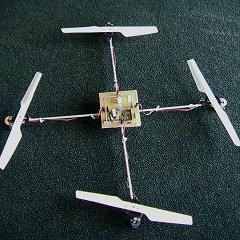
BXFlyer Four Rotor Helicopter
Posted February 21, 2012 by Chris
“I decided to build an autonomous flying robot about three years ago. I’ve converted RC cars to autonomous operation, so I thought that an RC helicopter might be a good place to start. I quickly discovered that the standard helicopter design would probably be too unstable in flight for my simple navigational and programming skills – but in searching the web I stumbled across the four rotor electric helicopter platform…and I was hooked!”

Areoquad: The Open Source Quadcopter
Posted January 13, 2012 by Chris
“AeroQuad hardware typically consists of an Arduino MCU as the flight controller board and an AeroQuad shield with various sensors, such as an accelerometer and gyroscope. AeroQuad software is written in C and uploaded to the MCU via the Arduino IDE. It currently supports an Acrobatic Mode that uses only the gyroscope for flight assistance, and a Stable Mode that uses the gyroscope and accelero-meter for leveled flight assist.”

SkeyeCopter UAV
Posted December 20, 2011 by Chris
“In previous and parallel work with autonomous airships we gained experience with UAV control and autonomous navigation. Compared to airships, the multirotor UAVs we use in one of our current projects are of course much smaller and can carry much less payload. On the other hand, due to their size, they can be deployed a lot faster and do not require any preparation except for connecting the batteries.”

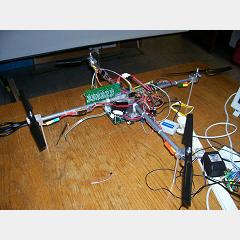
ARM Based Quadcopter
Posted December 6, 2011 by Chris
“The electronics setup consists of an ETT STM32 stamp module which runs custom flight software written in C. The board contains an ARM Cortex M3 microcontroller with 64K of RAM and 512K of flash rom. The board itself runs at 3.3V, but the inputs are 5V tolerant.”

BlimpDuino Version 2
Posted November 19, 2011 by Chris
If you are looking to make some autonomously controlled flying objects, a blimp is steady and slow way to get started. This article shows you how one team modified a toy blimp’s electronics to add some intelligence and autonomy to its flight.
FPGA Controlled Quad-Rotor Helicopter
Posted November 4, 2011 by Chris
“The Quad Rotor Helicopter is a semi autonomous robot. It flies with 4 rotors arranged in a + sign configuration. The Quad Rotor is a work in progress. The Quad rotor takes sensory input into an FPGA. The FPGA filters the input and runs a PID controller to control the speed of each propeller. The FPGA offers all of the sensor data to a cpu and the cpu makes decisions about the orientation.”

HeliPOV With Videos
Posted October 11, 2011 by Chris
This guy took the spinning POV idea one step further and added them to his helicopter’s rotor. There’s good control over the display as you can see in the few videos he has posted. The article has the source files of the software and hardware used to build the project, so take a look and build your own!

Quattrino Quadcopter
Posted October 7, 2011 by Chris
“September 2009, Quattrino’s project started as our Mechatronics Engineering graduation project in the German-Jordanian University. Quattrino or Quadrotor (which is the common name for it) is an aircraft classified as rotorcraft, lifted by four rotors and able to vertical take-off & landing (VTOL).” The project article has all the hardware, electrical and software details so go build your own!

Fireworks/Rocket Launcher Controller
Posted August 12, 2011 by Chris
This ATmega based rocket launching design functions as a controller for synchronous delayed triggering for launching model rockets or fireworks, whatever your passion. The article has all the details of how this project works and a video demonstrating it in action.
Currently Hot
Xbee Wireless Servo Control
control servo motors wirelessly with xbee wifi modules
DE0 Nano Intro Tutorial
learn the basics needed to use the de0 nano
DE0 Nano VGA via FPGA Reborn
the de0 nano fpga remake of the masochist's video card
TYMC: Album Artwork
automatically get the album cover for your mp3's
TYMC: ID3 From Web
plug all the holes in your MP3 ID3 tags
Animatronics

Recent Articles
Arduino DDS Shield
build your own arduino based analog signal generator
A Digital Multimeter In Review (Tenma 72-7735)
learn about your typical digital multimeter in review
The PIC Annoy PCB
build something to annoy your co-workers
Automate Your Life With Cron
learn how to use cron for computer automation
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Motor Control via Infrared Distance Sensor
control a motor simply by waving your hand

