



Get started learning to build your own electronics by following our FREE online courses below!
Learn More »
Categories
- animatronics (12)
- apple (11)
- arduino (179)
- art (41)
- articles (121)
- artificial intelligence (11)
- automation (421)
- avr (205)
- bitcoin (3)
- breadboard (9)
- cameras (57)
- cars (26)
- cell phones (28)
- clothing mods (21)
- console mods (26)
- dangerous (94)
- desktop mods (24)
- embedded (5)
- flying things (54)
- fpga (22)
- gaming creations (108)
- interface (225)
- internet (17)
- laptop mods (6)
- lasers (22)
- linux (7)
- magnetic (3)
- medical (12)
- microcontrollers (51)
- misc projects (152)
- msp (12)
- music (124)
- pic (90)
- projects (23)
- pyroedu (76)
- raspberry pi (26)
- robots (312)
- security (36)
- sensors (307)
- software (200)
- solar (19)
- stamp (9)
- tools (149)
- tutorials (98)
- Uncategorized (45)
- usb (44)
- wireless (256)
Sponsors
Build Like A Pyro!
Find many of the parts used on this site at our favorite online electronics shop


Raspberrypotter
Posted May 6, 2017 by Chris
"Raspberry Potter is an open source project that lets you control things around your room or your house with a magic wand. Imagine if you had a magic wand to control everyday things. Once you make a Raspberry Potter, you’ll be able to do just that – by drawing simple gestures in the air."
Microwave Beacon Finder
Posted November 10, 2013 by Chris
"As a beacon, unmodulated white light sucks….So, what to do? After rejecting a few stupid ideas I finally got interested in using X-Band microwave signals as a beacon. Oh my. Sounds pretty intimidating huh. 10,000 mHz radio is black magic. Or is it?"
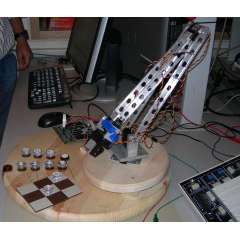
Robot Arm (that plays tic-tac-toe)
Posted August 17, 2013 by Chris
“In our project we made the arm the second player in the classic game of Tic-Tac-Toe to demonstrate its programmable repeatable motion. The arm consists of five servo motors, four to control the motion and one to control the end effecter (gripper). The arm moves tic-tac-toe pieces onto a board for its opponent and itself to give the user interactive control over the arm.”

System: Holodeck
Posted October 2, 2012 by Chris
“Project Holodeck is a virtual reality platform built with consumer facing technology, DIY off-the-shelf components, cutting-edge custom software, and creatively integrated peripherals. The goal of Project Holodeck is to bring 360-degree 6-DOF full-body virtual reality out of the research lab and into a fun, accessible consumer gaming platform.”

Magnetic Lego Whiteboard Eraser Robot
Posted September 11, 2012 by Chris
“Despite the fact that it is a really simple and cheap design, I really love this creation of a magnetic whiteboard eraser bot that’s built with Lego parts and a simple Atmel microcontroller, which acts as brain controller. Le Zhang and Michael Lathrop, both senior students at Cornell had this nice idea how to efficiently clean your professor’s whiteboard.”

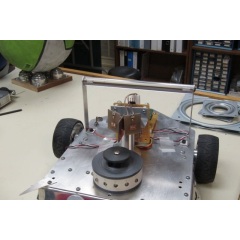
Sensor Driven Self-Guided RC Car
Posted February 24, 2012 by Chris
“Several years ago when I had the nerve to blow money on such things, I attempted to build a ’68 Volkswagen Beetle for The DARPA Grand Challenge. During that time I thought it would be fun to convert an RC car for self-guided operation. I bought the car from RadioShack for maybe $30, tore it apart, and promptly forgot about it completely.”
Rat Pups And Robots At UC Davis
Posted January 25, 2012 by Chris
“Design and development of robotic rat pups has been an iterative process and is always continuing. The first two generations of robopups we designed and implemented are shown in Figs. 4 and 5. The mechanical design of our robots is motivated by the aim to emulate some of the relevant physical characteristics of rat pups. Characteristics we view as important include scaled rat shape, rat size, rat sensor locations, and rat paws for locomotion.”
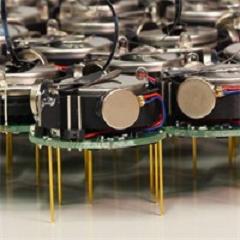
Light Reading: Build A Kilobot Swarm
Posted December 18, 2011 by Chris
“The robot design allows a single user to easily oversee the operation of a large Kilobot collective, such as programming, powering on, and charging all robots, which would be difficult or impossible to do with many existing robotic systems. The researchers demonstrate the capabilities of the Kilobot as a collective robot, using a 29 robot test collective to implement some popular swarm behaviors.”

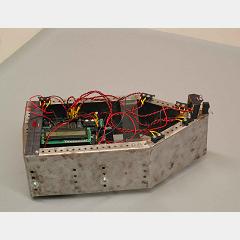
Open Automation Project
Posted December 13, 2011 by Chris
“The purpose of this project is to engineer modular software and electronic components, from which it is possible to assemble an intelligent mobile robot suitable for home/office environments. This project aims to fill the gap between the powerful mobile robot platforms typically used by researchers, and the small rug-roving robots with limited processing power that are popular with hobbyists.”

Computer Controlled – Chess Playing Robot
Posted September 7, 2011 by Chris
A Chess Playing Robot? Hell yeah! In a great display of what one engineer can do with some spare time, here is an automated system that will play chess against you and probably even beat you. This type of robot bridges the gap between playing against a computer on your monitor and actually moving chess piece on a board in real life. See the website for documentation and source code.
Currently Hot
DIY Mini PIC Development Board
build your own quick, easy and awesome pic dev board
Wireless XBee Pan/Tilt With Servos
build a wireless pan/tilt system for your camera
PIC Prototyping: MPLABX + PICKIT3 Intro
learn how to use mplabx with the new pickit3
FPGA to 16×2 LCD Interface (HD44780)
build a cpld to 16x2 lcd interface to display output
Using A Simple Tilt Sensor
learn how the most basic of tilt sensors works
Animatronics

Recent Articles
Arduino DDS Shield
build your own arduino based analog signal generator
A Digital Multimeter In Review (Tenma 72-7735)
learn about your typical digital multimeter in review
The PIC Annoy PCB
build something to annoy your co-workers
Automate Your Life With Cron
learn how to use cron for computer automation
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Motor Control via Infrared Distance Sensor
control a motor simply by waving your hand

