



Get started learning to build your own electronics by following our FREE online courses below!
Learn More »
Categories
- animatronics (12)
- apple (11)
- arduino (179)
- art (41)
- articles (121)
- artificial intelligence (11)
- automation (421)
- avr (205)
- bitcoin (3)
- breadboard (9)
- cameras (57)
- cars (26)
- cell phones (28)
- clothing mods (21)
- console mods (26)
- dangerous (94)
- desktop mods (24)
- embedded (5)
- flying things (54)
- fpga (22)
- gaming creations (108)
- interface (225)
- internet (17)
- laptop mods (6)
- lasers (22)
- linux (7)
- magnetic (3)
- medical (12)
- microcontrollers (51)
- misc projects (152)
- msp (12)
- music (124)
- pic (90)
- projects (23)
- pyroedu (76)
- raspberry pi (26)
- robots (312)
- security (36)
- sensors (307)
- software (200)
- solar (19)
- stamp (9)
- tools (149)
- tutorials (98)
- Uncategorized (45)
- usb (44)
- wireless (256)
Sponsors
Build Like A Pyro!
Find many of the parts used on this site at our favorite online electronics shop

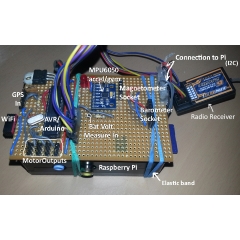
Quadcopter DIY With Autopilot
Posted March 28, 2017 by Chris
"Information on how to do this is quite hard to find on the Internet, so I hope this article will make the world of flight controllers more accessible and encourage more people to contribute to ArduCopter."

Iron Man Hulkbuster Cosplay Suit
Posted April 5, 2016 by Chris
"This article shows roughly what I’m intending to build and my concept of core functionality. Building the frame/stilts out of Plywood. Starting work on the hands so I can size the forearms and arm frame assembly. Building the Forearm mechanism with opening weapon pod. Working my way up the arm and building the shoulder mechanisms….and more…"
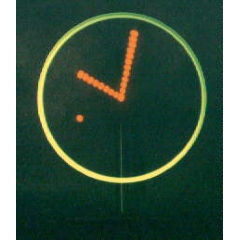
An Analog & Digital Propeller Clock
Posted August 19, 2015 by Chris
"An Analog & Digital propeller clock i made! It isn’t Real its just because your so awfully slow!!! 😉 based on an afterimage phenomenon, I.E. the reaction slowness of the retina, the illusion of reality our brains are ‘lying’"

Project 3 – Mechatronics Quadcopter
Posted August 7, 2015 by Chris
"The purpose of Project 3 was to actually get the quadcopter into the air, and possibly make it autonomously hover in place. Since the copter mechanical design was mostly finished during Project 2, Project 3 consisted mostly of the quadcopter software development and some minor troubleshooting tasks with electronics. In order to control the copter, the team decided to modify AeroQuad software to meet the demands of our configuration."

UVic Quadcopter Build Log
Posted June 15, 2015 by Chris
"This document captures all the relevant efforts that were made in construction of this quadcopter. The timeframe of the project is January 2011 to April2011."

Using Eco-drone Sensors To Map Water Quality
Posted April 20, 2015 by Chris
"Using a floating quadcopter made by local start-up Aerotestra, we proved that it is feasible for an autonomous flying robot to map various parameters at multiple GPS waypoints without human intervention."
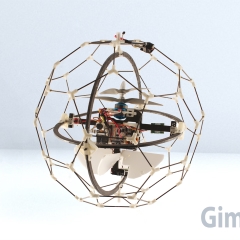
Robust Flight in Cluttered Indoor Environments (with GimBall)
Posted January 7, 2015 by Chris
"Robots capable of flight in cramped and cluttered environments have many advantages over their ground-based counterparts, but most current systems suffer from the same fundamental problem: any contact with obstacles have catastrophic, mission-ending results. What if instead of avoiding collisions, a flying robot became robust to them, and could even take advantage of contact with its environment?"
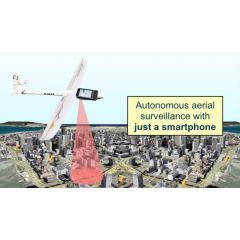
Flying Android Project
Posted January 3, 2015 by Chris
"In 2009, I was challenged by [govt agency] via GTRI to develop an Unmaned Aerial Vehicle (UAV) which is piloted by a smartphone. In particular, only the sensors on the phone may be used and the flight controller must run on the smartphone. Custom electronics were allowed to interface the phone to the airframe (PHY) but those electronics could sense or control."

Holderness Radio Balloon Launch
Posted October 12, 2014 by Chris
"In order to collect the necessary data, the metrological balloon will be sent with a payload to an altitude of 80,000 feet. The payload weighs five pounds and contains sensors that measure temperature, altitude, UV radiation, and atmosphere pressure. It will carry two cameras to take aerial photos of the horizon from ‘near space,’ the region between the boundary of space and the earth’s atmosphere."

Evil Remote Controlled Ghost
Posted April 5, 2014 by Chris
"As I started to get into multi-rotor aircraft, I came across the KKMulticopter platform as a good way to build inexpensive practice aircraft. As I looked at the design, I realized that it would be pretty easy to adapt it to a two-prop tilt-rotor design, but before I could begin coding the software for it, they released a firmware for just that! When I saw this video, I knew I was going to have to build one… and that I would use it for evil."
Currently Hot
Advanced VGA On A UP2
make even cooler stuff appear on your monitor
The Accelerometer
take input from an accelerometer and show some ouput
L298 Stepper Motor Control
control a stepper motor with the l298 (l298hn)
Creating VGA With VHDL
create vga signals with vhdl and the up2 board
The Music Equalizer Display
make your own music equalizer display with a pic
Animatronics

Recent Articles
Arduino DDS Shield
build your own arduino based analog signal generator
A Digital Multimeter In Review (Tenma 72-7735)
learn about your typical digital multimeter in review
The PIC Annoy PCB
build something to annoy your co-workers
Automate Your Life With Cron
learn how to use cron for computer automation
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Motor Control via Infrared Distance Sensor
control a motor simply by waving your hand

