



Get started learning to build your own electronics by following our FREE online courses below!
Learn More »
Categories
- animatronics (12)
- apple (11)
- arduino (179)
- art (41)
- articles (121)
- artificial intelligence (11)
- automation (421)
- avr (205)
- bitcoin (3)
- breadboard (9)
- cameras (57)
- cars (26)
- cell phones (28)
- clothing mods (21)
- console mods (26)
- dangerous (94)
- desktop mods (24)
- embedded (5)
- flying things (54)
- fpga (22)
- gaming creations (108)
- interface (225)
- internet (17)
- laptop mods (6)
- lasers (22)
- linux (7)
- magnetic (3)
- medical (12)
- microcontrollers (51)
- misc projects (152)
- msp (12)
- music (124)
- pic (90)
- projects (23)
- pyroedu (76)
- raspberry pi (26)
- robots (312)
- security (36)
- sensors (307)
- software (200)
- solar (19)
- stamp (9)
- tools (149)
- tutorials (98)
- Uncategorized (45)
- usb (44)
- wireless (256)
Sponsors
Build Like A Pyro!
Find many of the parts used on this site at our favorite online electronics shop


The Cherry Express
Posted January 29, 2020 by Chris
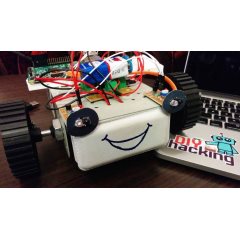
“Finally got the linebot working reliably. I’ve uploaded 3 images and a movie. I also included the modified Arduino script provided for the “method 1” servos and “V2 Adafruit_Motorshield” I’m using. My sensor board image shows the original 5 sensors described in your “Arduino Robotics” book, but you’ll notice now only the three middle sensors have signal wires, to match the 3-sensor script you provided. “

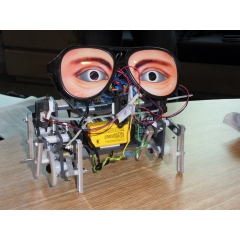
The Stubby Robot
Posted December 30, 2019 by Chris
“Stubby is an evolving hexapod robot which I am making, with contributions from my 6 year old daughter and a co-worker. I have long wanted to make a walking robot, thanks to shows like Stargate SG-1. While Stubby is not the same, it has been a very entertaining and educational project to work on.”

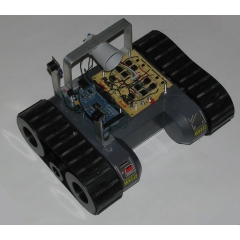
Constructing a Bluetooth controlled Robot
Posted April 11, 2018 by Chris
"In this post, I’ll show how to construct a robot with .NET Gadgeteer and how to control it using a Bluetooth connection from a PC application based on the 32feet.NET library. Let’s start from .NET Gadgeteer part. The base of our robot is the Rover 5 Tank Chassis, that provides two motors that can be easily controlled by the Motor Driver L298 Module."
Build Raspberry Pi Robots (For Beginners)
Posted February 7, 2018 by Chris
"If you are a beginner to Raspberry Pi and were looking for a simple hardware project, then look no further. This tutorial will show you to develop a python based robot which avoids obstacles and navigates freely. Obstacle avoiding robots are fairly common and easy to make. Here, you can use this project to add object avoidance functionality to your robot."

Wally Robot
Posted August 7, 2017 by Chris
"Wally is a wall following robot that uses ultrasonic (ping) sensors to detect objects in its path, much like a bat uses SONAR to “see” things around it. Ultrasonic sensors are like high-frequency microphone/speakers."

Humanoid Robot Giger
Posted July 5, 2017 by Chris
"This bot was designed in Autodesk Inventor, and machined from 5052 alloy aircraft aluminum using a Sherline 2000 CNC and some work from Rapid Sheet Metal. He stands 62cm tall, weighs about 5kg and uses a total of 10x EX-106+, 6x RX-64s, and 8x RX-28s."
Killtron 7000
Posted June 8, 2017 by Chris
"Killtron 7000 is a biologically inspired crab walking robot designed by me and my team at the University of Victoria back in 2011. The success of the robot was determined by how well it can autonomously navigate between several walls and how much weight it can carry. Many thanks to Aaron Gehman, Andy Berry, Tina Hung, Joshua Yin, Eva Sun and Yuto Hori for making this possible."


Robotic Arm Tracks Hand Movement
Posted May 18, 2017 by Chris
"This past week, I made a robotic arm that tracks your hand in free space using a Leap Motion, Arduino, and node.js. It tracks my hand very well. It is able to pick up stuff and set it down with relatively good precision, although there is definitely some room for improvement."
Currently Hot
DIY Mini PIC Development Board
build your own quick, easy and awesome pic dev board
Wireless XBee Pan/Tilt With Servos
build a wireless pan/tilt system for your camera
PIC Prototyping: MPLABX + PICKIT3 Intro
learn how to use mplabx with the new pickit3
FPGA to 16×2 LCD Interface (HD44780)
build a cpld to 16x2 lcd interface to display output
Using A Simple Tilt Sensor
learn how the most basic of tilt sensors works
Animatronics

Recent Articles
Arduino DDS Shield
build your own arduino based analog signal generator
A Digital Multimeter In Review (Tenma 72-7735)
learn about your typical digital multimeter in review
The PIC Annoy PCB
build something to annoy your co-workers
Automate Your Life With Cron
learn how to use cron for computer automation
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Motor Control via Infrared Distance Sensor
control a motor simply by waving your hand

