



Get started learning to build your own electronics by following our FREE online courses below!
Learn More »
Categories
- animatronics (12)
- apple (11)
- arduino (179)
- art (41)
- articles (121)
- artificial intelligence (11)
- automation (421)
- avr (205)
- bitcoin (3)
- breadboard (9)
- cameras (57)
- cars (26)
- cell phones (28)
- clothing mods (21)
- console mods (26)
- dangerous (94)
- desktop mods (24)
- embedded (5)
- flying things (54)
- fpga (22)
- gaming creations (108)
- interface (225)
- internet (17)
- laptop mods (6)
- lasers (22)
- linux (7)
- magnetic (3)
- medical (12)
- microcontrollers (51)
- misc projects (152)
- msp (12)
- music (124)
- pic (90)
- projects (23)
- pyroedu (76)
- raspberry pi (26)
- robots (312)
- security (36)
- sensors (307)
- software (200)
- solar (19)
- stamp (9)
- tools (149)
- tutorials (98)
- Uncategorized (45)
- usb (44)
- wireless (256)
Sponsors
Build Like A Pyro!
Find many of the parts used on this site at our favorite online electronics shop


The Ghost Gunner
Posted April 1, 2018 by Chris
"Ghost Gunner is a non-profit open source hardware effort by Defense Distributed. Ghost Gunner builds on the open source community’s existing hard work, including the gshield 3 axis motion hardware, the grbl g-code parser and motion controller, and the legendary Arduino microcontroller. All GhostGunner schematics and design files will be published into the public domain."

300mW DIY Laser Cutter
Posted March 26, 2018 by Chris
"I built this laser cutter after being inspired by [a project I saw] and the design is almost identical, there for I will not go into details about my build but will instead focus on what you can do with it."

Iron Man Hulkbuster Cosplay Suit
Posted April 5, 2016 by Chris
"This article shows roughly what I’m intending to build and my concept of core functionality. Building the frame/stilts out of Plywood. Starting work on the hands so I can size the forearms and arm frame assembly. Building the Forearm mechanism with opening weapon pod. Working my way up the arm and building the shoulder mechanisms….and more…"

How To Make A PCB At Home
Posted March 11, 2016 by Chris
"We all are very familiar with Printed Circuit Boards or PCBs as they are easily found in television sets, computers and in every electronic device. PCB is widely accepted and most commonly used in Electronics industry. PCB is very cost effective, it assembles the complex circuits in small space and eliminates the risk of loose connections, it has pre designed copper tracks to connect the components in effective and clean way."

Prankophone with Synthesizer
Posted February 11, 2016 by Chris
"Prankophone is a sound object being a hybrid of synthesizer, telephone and logic module. The main principle of the object’s functioning is as follows: depending on the current mode, the apparatus calls to random or pre-defined recipients and plays them algorithmic melodies created from their phone numbers. The speakers transmit both the synthesized sounds and the sound from answering person."

Office Prank DIY Zombie Selfie
Posted January 27, 2016 by Chris
"To spice up the office around Halloween I decided to make a molded zombie arm that takes pictures of zombie lunch and posted them to the Twitter account @ZombieSelfie."
Exploring Voltage Multipliers
Posted December 30, 2015 by Chris
"Voltage Multipliers are the circuits where we get very high DC voltage from the Low AC voltage supply, a voltage multiplier circuit generates voltage in multiple of peak input voltage of AC, like if the peak voltage of AC voltage is 5 volt, we will get 15 volt DC at the output, in case of Voltage Tripler circuit."

Mind-Controlled Nerf Gun
Posted August 28, 2015 by Chris
"Hardware setup is pretty easy for this, it’s nothing compared to what you’ve just done for the Nerf gun. Grab your breadboard, plug in your Bluetooth module (assuming you’ve soldered some headers onto the six-pin interface), and connect some wires…"

Project Sentry Gun
Posted July 21, 2015 by Chris
"On this site we have published complete directions on how to make your own sentry gun, which autonomously tracks, aims, and shoots at targets…We are a unique project in that everything we do is completely open-source. This includes 100% of our code, as well as our electrical schematics, and even the CAD design files for our Standalone Controller. Our system has been used on six continents and in more than 20 countries (so far), and is even used by the Australian Navy in their training program."
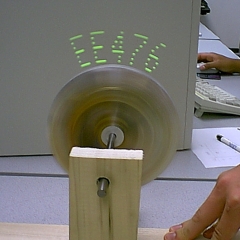
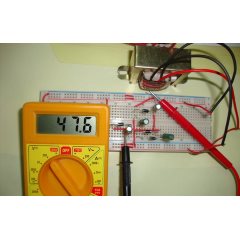
AT90LS8515 Digital Message Machine
Posted June 22, 2015 by Chris
"The display consists of 7 LEDs in a vertical row. By moving them fast enough back and forth over each other, I can display a message which appears to be generated by a 7*n matrix of LEDs and not a single column of LEDs."
Currently Hot
An Introduction To VHDL
a small tutorial on using vhdl with a cpld
The Autonomous Drifter
autonomous drifter controlled by your laptop
An Introduction To Verilog
a small tutorial on using verilog with a cpld
Altera’s UP2 Board
learn about the up2 & create a 4-bit full adder
Build A CPLD Dev Board
make your own cpld development board
Animatronics

Recent Articles
Arduino DDS Shield
build your own arduino based analog signal generator
A Digital Multimeter In Review (Tenma 72-7735)
learn about your typical digital multimeter in review
The PIC Annoy PCB
build something to annoy your co-workers
Automate Your Life With Cron
learn how to use cron for computer automation
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Motor Control via Infrared Distance Sensor
control a motor simply by waving your hand

