



Get started learning to build your own electronics by following our FREE online courses below!
Learn More »
Categories
- animatronics (12)
- apple (11)
- arduino (179)
- art (41)
- articles (121)
- artificial intelligence (11)
- automation (421)
- avr (205)
- bitcoin (3)
- breadboard (9)
- cameras (57)
- cars (26)
- cell phones (28)
- clothing mods (21)
- console mods (26)
- dangerous (94)
- desktop mods (24)
- embedded (5)
- flying things (54)
- fpga (22)
- gaming creations (108)
- interface (225)
- internet (17)
- laptop mods (6)
- lasers (22)
- linux (7)
- magnetic (3)
- medical (12)
- microcontrollers (51)
- misc projects (152)
- msp (12)
- music (124)
- pic (90)
- projects (23)
- pyroedu (76)
- raspberry pi (26)
- robots (312)
- security (36)
- sensors (307)
- software (200)
- solar (19)
- stamp (9)
- tools (149)
- tutorials (98)
- Uncategorized (45)
- usb (44)
- wireless (256)
Sponsors
Build Like A Pyro!
Find many of the parts used on this site at our favorite online electronics shop


Tutorial: Ultrasonic Ranging with the Freedom Board
Posted February 12, 2013 by Chris
“Question: What makes 8 times ‘beep’, but cannot be heard?
Answer: My ultrasonic range finder 🙂 ~ FRDM-KL25Z with HC-SR04. What I’ve added to my FRDM-KL25Z board is an ultrasonic distance sensor, measuring distances up to 4 meters.”
Don’t miss this thorough tutorial on using and interfacing ultrasonic range finders to microcontrollers.

The Finch – A Robot For Education
Posted February 11, 2013 by Chris
“The Finch is a new robot for computer science education. Its design is the result of a four year study at Carnegie Mellon’s CREATE lab. The Finch is designed to support an engaging introduction to the art of programming. It has support for over a dozen programming languages and environments, including several environments appropriate for students as young as eight years old.”
A Versatile PIC Based Robot [pdf]
Posted February 3, 2013 by Chris
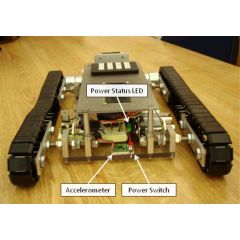
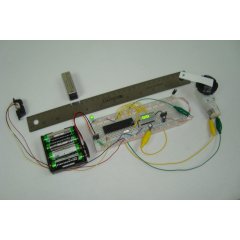
“Our group designed and manufactured a miniature robotic vehicle that conquers various terrains. The vehicle was designed with a track system which is powered by two DC motors. The motors use a Quadruple half H-Driver in order to drive the motors in both directions….These configurations allow the vehicle to drive on various terrains. ”

The CHORG Project – Robotic Arm
Posted January 31, 2013 by Chris
“The CHORG project consists in both a hardware and software platform both of them developed by myself. The main purpose of this project is to create a robot arm capable of adapting a task to randomness of the real environment. While the hardware’s imperfections serve as good way measure the randomness the software purpose is to adapt that and allow it to successfully perform a certain task.”

Low-Cost Blood Pressure Monitoring Device
Posted January 28, 2013 by Chris
“This project will develop a low cost, easy-to-use device to assist a minimally-trained person in taking the BP using a cuff, a cell-phone and small signal acquisition box that connects both.”

FlockBots – Open Source Swarmbots
Posted January 26, 2013 by Chris
“This website describes an open design for a small, $800 robot suitable for swarm-style multiagent research, robotics education, and other tasks. Our goal is to get as much functionality as possible from $800 per robot, replicate the robot many times to create a small collaborative swarm, and document the results to make it easier for you to do the same.”

Felix @ Daddio Robotics
Posted January 22, 2013 by Chris
“Felix is one of the first robots I created using the kinect sensor. Felix uses NPC Robotics 24V Electric Gear Motor Set – R81, R82. they are basically wheelchair motors. With 10? solid wheels and custom aluminum hubs. For the Robot Stroller kit I use 2 of the Jazzy Select Elite, Coupled with 2 of the 12 inch tires.”

E-bike Computer Chronicle
Posted January 5, 2013 by Chris
“The E-bike computer. It gives me different information about the bicycle like: battery voltage, external temperature, temperature of the battery, speed and distance traveled. There is also a throttle and state of charge indicator. This is how I accelerate the bicycle giving the input to the motor to move forward.”

Motor Control via Infrared Distance Sensor
Posted January 3, 2013 by Chris
“In this article, we will go step-by-step through the process of understanding, designing and building a system that uses an infrared proximity sensor for input, correlates that input to how far away an object is from the sensor and then drives a motor and some LEDs at distinct speeds depending upon the proximity of the object.”
HiJack In the Box
Posted January 2, 2013 by Chris
“HiJack is a hardware/software platform for creating cubic-inch sensor peripherals for the mobile phone. HiJack devices harvest power and use bandwidth from the mobile phone’s headset interface. The HiJack platform enables a new class of small and cheap phone-centric sensor peripherals that support plug-and-play operation.”
Currently Hot
An Arduino Outputting VGA Signals
output some basic vga using an arduino uno
Super Simple Arduino Tachometer
build an arduino tachometer and measure rpms
Arduino 16×2 LCD Interface
display characters on an lcd using your arduino
DE0-Nano FPGA Tilt Sensing
use the de0-nano board to sense tilt and acceleration
DE0-Nano FPGA Breakout Board
build your own custom i/o expander breakout board
Animatronics

Recent Articles
Arduino DDS Shield
build your own arduino based analog signal generator
A Digital Multimeter In Review (Tenma 72-7735)
learn about your typical digital multimeter in review
The PIC Annoy PCB
build something to annoy your co-workers
Automate Your Life With Cron
learn how to use cron for computer automation
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Motor Control via Infrared Distance Sensor
control a motor simply by waving your hand

