



Get started learning to build your own electronics by following our FREE online courses below!
Learn More »
Categories
- animatronics (12)
- apple (11)
- arduino (179)
- art (41)
- articles (121)
- artificial intelligence (11)
- automation (421)
- avr (205)
- bitcoin (3)
- breadboard (9)
- cameras (57)
- cars (26)
- cell phones (28)
- clothing mods (21)
- console mods (26)
- dangerous (94)
- desktop mods (24)
- embedded (5)
- flying things (54)
- fpga (22)
- gaming creations (108)
- interface (225)
- internet (17)
- laptop mods (6)
- lasers (22)
- linux (7)
- magnetic (3)
- medical (12)
- microcontrollers (51)
- misc projects (152)
- msp (12)
- music (124)
- pic (90)
- projects (23)
- pyroedu (76)
- raspberry pi (26)
- robots (312)
- security (36)
- sensors (307)
- software (200)
- solar (19)
- stamp (9)
- tools (149)
- tutorials (98)
- Uncategorized (45)
- usb (44)
- wireless (256)
Sponsors
Build Like A Pyro!
Find many of the parts used on this site at our favorite online electronics shop


A DIY Robotic ARM
Posted May 15, 2017 by Chris
"The CHORG project consists in both a hardware and software platform both of them developed by myself. The main purpose of this project is to create a robot arm capable of adapting a task to randomness of the real environment."

DIY Drink Mixing Robot
Posted May 3, 2017 by Chris
"I built a robot that mixes drinks named Bar Mixvah. It utilizes an Arduino microcontroller switching a series of pumps via transistors on the physical layer, and the MEAN stack (MongoDB, Express.js, Angular.js, Node.js) and jQuery for the frontend and backend."

The Seg Bot
Posted April 18, 2017 by Chris
"The Seg-bot is a DIY segway clone that costs around $500 to build. It will attempt to keep the rider upright at 0 degrees (level), so if you lean forward it will travel forward to correct its position – the farther you lean, the faster it will go to correct itself."
Robotic Motion Controller
Posted April 9, 2017 by Chris
"The Five-Axis Robotic Motion Controller aims to bring physical input and output closer together through the design purpose-built tools for fabrication, which hopefully leads to many new creative opportunities for designers."

Twixbot
Posted March 13, 2017 by Chris
"A metal tin makes a neat little enclosure for some electronics and is usually rigid enough to mount some motors to. I have lots of motors laying around so it took very little effort to get this particular bot running (under an hour from start to finish) and there are very few parts."
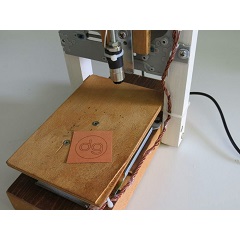
38mm x 38mm Laser Engraver Build Using CD-RW on ATmega328p
Posted October 24, 2015 by Chris
"To build this tool I’ve used two old CD-ROM writer that lays around in my garage.
The X/Y positioning system it is build using the CD-ROM motor assembly. For the engraving laser i use the CD-ROM writer laser. With this hardware the engraving area are will be almost 38mm x 38mm."

DIY – gForce 1.0
Posted September 23, 2015 by Chris
"Basically, the system uses an accelerometer to measure g-force and a SD card to store the data. An Arduino UNO is used to process the data coming from the accelerometer and save it on to a SD card. The system was originally developed for setup tuning and performance optimization in RC cars."
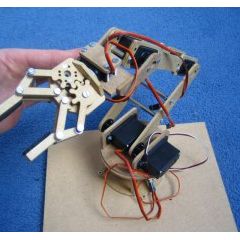
Mini Servo Grippers + Robotic Arm
Posted September 20, 2015 by Chris
"A little time ago I made a robotic arm, without the gripper. So last week I draw a gripper that is compatible with a mini servo, I made two versions because I had to chose between two kinds of gears, straight and rounded."
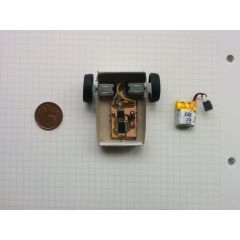
Matchbox Car v1 Build
Posted September 18, 2015 by Chris
"This build consists of a tiny DC motors ripped from a pair of 9g servos, a h-bridge motor controller, an el-cheapo 8 bit pic and a 100mAh 3.7V LiPo battery."
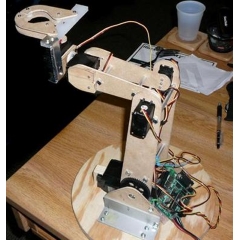
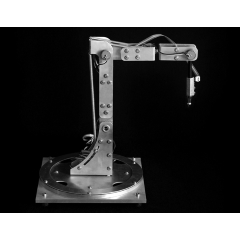
Creation of A Robotic Arm
Posted September 6, 2015 by Chris
"This is the robotic arm I built to demonstrate at the Cub Scout meeting a few days ago. It’s main construction material is hardboard — sort of like clipboard material but a little bit more flexible. Ideally it would be built out of aluminum, but hardboard is very fast to shape and drill through, so in the interest of time it was chosen."
Currently Hot
DIY Mini PIC Development Board
build your own quick, easy and awesome pic dev board
Wireless XBee Pan/Tilt With Servos
build a wireless pan/tilt system for your camera
PIC Prototyping: MPLABX + PICKIT3 Intro
learn how to use mplabx with the new pickit3
FPGA to 16×2 LCD Interface (HD44780)
build a cpld to 16x2 lcd interface to display output
Using A Simple Tilt Sensor
learn how the most basic of tilt sensors works
Animatronics

Recent Articles
Arduino DDS Shield
build your own arduino based analog signal generator
A Digital Multimeter In Review (Tenma 72-7735)
learn about your typical digital multimeter in review
The PIC Annoy PCB
build something to annoy your co-workers
Automate Your Life With Cron
learn how to use cron for computer automation
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Motor Control via Infrared Distance Sensor
control a motor simply by waving your hand

