



Get started learning to build your own electronics by following our FREE online courses below!
Learn More »
Categories
- animatronics (12)
- apple (11)
- arduino (179)
- art (41)
- articles (121)
- artificial intelligence (11)
- automation (421)
- avr (205)
- bitcoin (3)
- breadboard (9)
- cameras (57)
- cars (26)
- cell phones (28)
- clothing mods (21)
- console mods (26)
- dangerous (94)
- desktop mods (24)
- embedded (5)
- flying things (54)
- fpga (22)
- gaming creations (108)
- interface (225)
- internet (17)
- laptop mods (6)
- lasers (22)
- linux (7)
- magnetic (3)
- medical (12)
- microcontrollers (51)
- misc projects (152)
- msp (12)
- music (124)
- pic (90)
- projects (23)
- pyroedu (76)
- raspberry pi (26)
- robots (312)
- security (36)
- sensors (307)
- software (200)
- solar (19)
- stamp (9)
- tools (149)
- tutorials (98)
- Uncategorized (45)
- usb (44)
- wireless (256)
Sponsors
Build Like A Pyro!
Find many of the parts used on this site at our favorite online electronics shop


Multichannel USB Analog Sensor with ATMega48
Posted August 27, 2012 by Chris
“Sometimes it’s tempting to re-invent the wheel to make a device function exactly the way you want. I am re-visiting the field of homemade electrophysiology equipment, and although I’ve already published a home made electocardiograph (ECG), I wish to revisit that project and make it much more elegant, while also planning for a pulse oximeter, an electroencephalograph (EEG), and an electrogastrogram (EGG).”

Dual PIC Thermometer
Posted August 24, 2012 by Chris
“The geek inside me has always wanted a fridge that shows the inside temperature for both the freezer and the fridge compartments. However, when we recently replaced our very old fridge we ended up getting a new one without the built in thermometer. So I decided that one of my next projects would have to rectify this problem.”

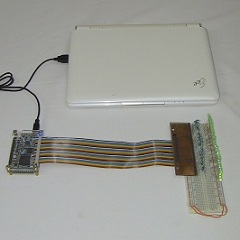
DE0-Nano FPGA Tilt Sensing
Posted August 16, 2012 by Chris
“This article will show you how an accelerometer works, how it can be used to detect tilt and also how we can display that tilt ‘value’ visually on a large array of LEDs on my DE0-Nano breakout board. This way whenever we need to see if something is level, we can use this simple but fun tool to know, although don’t count on multiple decimal precision here!

Using A Light-Pipe As A Robotic Touch Sensor
Posted August 14, 2012 by Chris
“We’re all familiar with optical fibres. These are usually glass or plastic fibres that conduct light from one end to the other with relatively little loss. While these are typically solid, I wondered whether I could make a ‘fibre optic’ cable out of plastic tubing and water. No longer a fibre I suppose this would be better described as a light-pipe.”

Dynamic Vision Sensing for Pole Balancing
Posted July 31, 2012 by Chris
“In our demonstration, we address the challenging problem of balancing an arbitrary standard pencil, based solely on visual information. A stereo pair of silicon retinas reports vision events caused by the moving pencil, which is standing on its tip on an actuated table.”

Wine-Saving AVR Temperature Controller
Posted June 29, 2012 by Chris
“Wine doesn’t like subzero temperatures, and during wintertime, my “winecellar” got pretty cold. There was an electric heating element, but the thermostat was broken, so it was either full burn or nothing. That’s how the temperature monitor/controller came to be.”

Target Tracking and Interception
Posted June 12, 2012 by Chris
“The main aim of the project is to implement a Wireless Sensor Network (WSN) Tracking System. This system is based on a few basic ideas: Sensor Nodes knowing each other’s position — Collaboration tracking via multi-sensor nodes — Estimation of the position of the trespasser robot using Extended Kalman Filtering.”

Ultrasonic Equipped Hummer
Posted June 2, 2012 by Chris
“The project is intended to build a mobile platform that keeps a certain distance from the vehicle in front of it by reducing or increasing the speed to follow. The main goal is to keep the hummer 1-3 meters behind the object in front of it.”

E-Thermometer via LM35 and LM3914
Posted May 30, 2012 by Chris
“As shown in the schematic, the temperature sensor of our electronic thermometer is an LM35DZ. For one degree of temperature change, it increases its output 10mV, this circuit measures temperature values only between +10°C and +39°C.”

Building A Robot – Part 3: Proximity Sensor
Posted May 17, 2012 by Chris
“This week we will continue our Building A Robot series with Part 3: The Proximity Sensor. The standard IR proximity sensor will be introduced and integrated into the robot we built in Part 1: The Chassis and combined with the motor control we developed in Part 2: Motor Control. The final product will be a robot that can sense its surroundings.”
Currently Hot
An Arduino Outputting VGA Signals
output some basic vga using an arduino uno
Super Simple Arduino Tachometer
build an arduino tachometer and measure rpms
Arduino 16×2 LCD Interface
display characters on an lcd using your arduino
DE0-Nano FPGA Tilt Sensing
use the de0-nano board to sense tilt and acceleration
DE0-Nano FPGA Breakout Board
build your own custom i/o expander breakout board
Animatronics

Recent Articles
Arduino DDS Shield
build your own arduino based analog signal generator
A Digital Multimeter In Review (Tenma 72-7735)
learn about your typical digital multimeter in review
The PIC Annoy PCB
build something to annoy your co-workers
Automate Your Life With Cron
learn how to use cron for computer automation
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Motor Control via Infrared Distance Sensor
control a motor simply by waving your hand

