



Get started learning to build your own electronics by following our FREE online courses below!
Learn More »
Categories
- animatronics (12)
- apple (11)
- arduino (179)
- art (41)
- articles (121)
- artificial intelligence (11)
- automation (421)
- avr (205)
- bitcoin (3)
- breadboard (9)
- cameras (57)
- cars (26)
- cell phones (28)
- clothing mods (21)
- console mods (26)
- dangerous (94)
- desktop mods (24)
- embedded (5)
- flying things (54)
- fpga (22)
- gaming creations (108)
- interface (225)
- internet (17)
- laptop mods (6)
- lasers (22)
- linux (7)
- magnetic (3)
- medical (12)
- microcontrollers (51)
- misc projects (152)
- msp (12)
- music (124)
- pic (90)
- projects (23)
- pyroedu (76)
- raspberry pi (26)
- robots (312)
- security (36)
- sensors (307)
- software (200)
- solar (19)
- stamp (9)
- tools (149)
- tutorials (98)
- Uncategorized (45)
- usb (44)
- wireless (256)
Sponsors
Build Like A Pyro!
Find many of the parts used on this site at our favorite online electronics shop


Open Hardware Micro-Robot Swarm Project
Posted November 24, 2013 by Chris
"All of the hardware and software is open (in the GPL sense), including parts lists, circuit board and chassis designs, and software. With a stated goal to produce sub-€100 robots, I’d really like to see this take off. Combined with a wireless power surface, a micro-robot in perpetual motion would make a great desk ornament!"

Autonomous Driving Car
Posted November 21, 2013 by Chris
"For our final project, we re-engineered a remote control car to autonomously navigate through a track by detecting lanes and centering itself between them as well as detect objects in front of it and avoid collision. The RC car detects lanes through image input from a low-resolution camera mounted at its front. Using an IR distance sensor, the car determines when to stop accelerating once a certain distance between a forward object has been breached."

Bluetooth Remote Control Car With Smartphone
Posted November 12, 2013 by Chris
"To the RC car I removed all the electronics except the motors and i installed 6 new AA 1,2V rechargeable NiMh 1900mAh batteries. I designed new electronics based on Arduino with a HC-05 Bluetooth module and two h-bridge ic’s. The SN754410 for steering motor and the L298N for forward/backward motor. For both ic’s i connected parallel the channels, 1 with 4 and 2 with 3."
Microwave Beacon Finder
Posted November 10, 2013 by Chris
"As a beacon, unmodulated white light sucks….So, what to do? After rejecting a few stupid ideas I finally got interested in using X-Band microwave signals as a beacon. Oh my. Sounds pretty intimidating huh. 10,000 mHz radio is black magic. Or is it?"

Building An N-Bot (African Robotics Network)
Posted November 4, 2013 by Chris
"N-Bot is an educational robotic platform developed at the NatalNet laboratory with the aim of making robots popular among students of all ages. N-Bot uses a simple, yet universal communication interface: the audio channel."

IR Remote Controlled Car (with ATMega8)
Posted October 8, 2013 by Chris
"The circuit was build with microcontroller ATmega8.
Here, I’m extending the same circuit to control the DC motor with IR remote control. The motor is fitted on a toy car wheels with gears, as shown in the figure above."

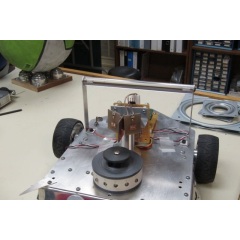
Robot Rally Bug
Posted October 7, 2013 by Chris
"The 2009 Robot Rally spotlighted all the flaws that result from a quick 3 week engineering and building project. Time saving shortcuts in code and hardware bit my butt several times. Failed edge detectors – Ouch! Failed beacon tracker … chomp! Ow! Line follower reversal – Arrrg! I’m happy to report I’ve investigated all the issues that cropped up and fixed them all."
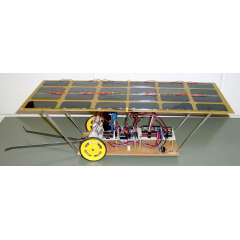
Photovoltaic Martian Bugs
Posted October 4, 2013 by Chris
"The objective of the Photovoltaic Martian Bug project is to create small autonomous robots. These robots will be powered by solar panels and intelligently react with their environment."

The Robotic Haptic Creature
Posted September 30, 2013 by Chris
"The Haptic Creature has three degrees of freedom through which it communicates its emotional state: a pair of ears, which vary in stiffness; lungs, which simulate breathing; and a purr box, which renders a vibrotactile “purr”. The robot has an array of force sensors across its body to sense touch and an accelerometer to sense movement."

Nøkken – ROV (Underwater Exploration Vehicle)
Posted September 16, 2013 by Chris
“This project started about 8 months ago in January 2010, when I saw that a surprising number of people were making ROVs at home. Though very few had footage of anything interesting, it certainly proved the concept was viable. I’ve always been fascinated and fearful of the ocean, so this seemed a great way to explore the depths without having to personally go where the sun doesn’t shine.”
Currently Hot
Homemade PCB (Etching)
build a pcb board with your bare hands
Simple Motor Optical Encoder
build a simple-low cost optical encoder
Intro To Digital Timers
learn about digital timers and the pic
Personal G-Force Meter
make your own personal g-force meter
VHDL Keyboard Input
use vhdl to interface a cpld to a keyboard
Animatronics

Recent Articles
Arduino DDS Shield
build your own arduino based analog signal generator
A Digital Multimeter In Review (Tenma 72-7735)
learn about your typical digital multimeter in review
The PIC Annoy PCB
build something to annoy your co-workers
Automate Your Life With Cron
learn how to use cron for computer automation
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Motor Control via Infrared Distance Sensor
control a motor simply by waving your hand

