



Get started learning to build your own electronics by following our FREE online courses below!
Learn More »
Categories
- animatronics (12)
- apple (11)
- arduino (179)
- art (41)
- articles (121)
- artificial intelligence (11)
- automation (421)
- avr (205)
- bitcoin (3)
- breadboard (9)
- cameras (57)
- cars (26)
- cell phones (28)
- clothing mods (21)
- console mods (26)
- dangerous (94)
- desktop mods (24)
- embedded (5)
- flying things (54)
- fpga (22)
- gaming creations (108)
- interface (225)
- internet (17)
- laptop mods (6)
- lasers (22)
- linux (7)
- magnetic (3)
- medical (12)
- microcontrollers (51)
- misc projects (152)
- msp (12)
- music (124)
- pic (90)
- projects (23)
- pyroedu (76)
- raspberry pi (26)
- robots (312)
- security (36)
- sensors (307)
- software (200)
- solar (19)
- stamp (9)
- tools (149)
- tutorials (98)
- Uncategorized (45)
- usb (44)
- wireless (256)
Sponsors
Build Like A Pyro!
Find many of the parts used on this site at our favorite online electronics shop


Make A Burning Laser The Right Way
Posted April 15, 2012 by Chris
“In this blog I will teach you step by step how to build your very own burning laser. Unlike other popular ways of building your own burning laser I will show you how to do it properly to ensure a long and healthy life for your new laser.”

Microcontroller Interrupter Gear
Posted April 4, 2012 by Chris
“During World War I and slightly before World War II, military fighter aircraft had machine guns mounted to fuselage of the plane. These machine guns were mounted right behind the propeller. The first question that comes to mind is how can the gun fire and not hit the propeller blades as they are spinning? Some planes had special steel plates mounted to the propeller to keep the bullets from shredding the propeller.”

Areoquad: The Open Source Quadcopter
Posted January 13, 2012 by Chris
“AeroQuad hardware typically consists of an Arduino MCU as the flight controller board and an AeroQuad shield with various sensors, such as an accelerometer and gyroscope. AeroQuad software is written in C and uploaded to the MCU via the Arduino IDE. It currently supports an Acrobatic Mode that uses only the gyroscope for flight assistance, and a Stable Mode that uses the gyroscope and accelero-meter for leveled flight assist.”

SkeyeCopter UAV
Posted December 20, 2011 by Chris
“In previous and parallel work with autonomous airships we gained experience with UAV control and autonomous navigation. Compared to airships, the multirotor UAVs we use in one of our current projects are of course much smaller and can carry much less payload. On the other hand, due to their size, they can be deployed a lot faster and do not require any preparation except for connecting the batteries.”

ARM Based Quadcopter
Posted December 6, 2011 by Chris
“The electronics setup consists of an ETT STM32 stamp module which runs custom flight software written in C. The board contains an ARM Cortex M3 microcontroller with 64K of RAM and 512K of flash rom. The board itself runs at 3.3V, but the inputs are 5V tolerant.”
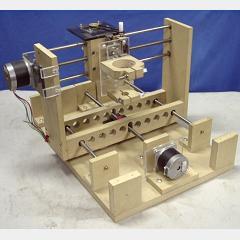
PIC Powered CNC Drill
Posted November 23, 2011 by Chris
“Made from Dremel drill and drill press. I removed the bottom plate & mounted the column to the back with U-bolts. Acrylic is so easy to work with. It can be cut, drilled milled & glued and it’s very strong, doesn’t warp or break easily. The design is the same as the big PCB drills, the table moves, not the drill head. With the exception the real machine tables I’ve worked around ride on air.”

FPGA MD5 Cracker
Posted November 9, 2011 by Chris
“For my Digital Systems Laboratory (ECE 385) at the University of Illinois I had to do a final project using a field-programmable gate array (FPGA). My partner and I designed a hardware implementation of the MD5 algorithm and used it to crack MD5 password hashes. A FPGA allows you to prototype digital circuits by utilizing a hardware description language such as VHDL.”
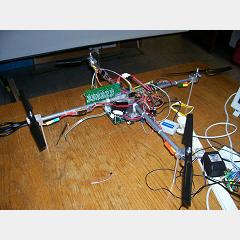
FPGA Controlled Quad-Rotor Helicopter
Posted November 4, 2011 by Chris
“The Quad Rotor Helicopter is a semi autonomous robot. It flies with 4 rotors arranged in a + sign configuration. The Quad Rotor is a work in progress. The Quad rotor takes sensory input into an FPGA. The FPGA filters the input and runs a PID controller to control the speed of each propeller. The FPGA offers all of the sensor data to a cpu and the cpu makes decisions about the orientation.”

HeliPOV With Videos
Posted October 11, 2011 by Chris
This guy took the spinning POV idea one step further and added them to his helicopter’s rotor. There’s good control over the display as you can see in the few videos he has posted. The article has the source files of the software and hardware used to build the project, so take a look and build your own!

Quattrino Quadcopter
Posted October 7, 2011 by Chris
“September 2009, Quattrino’s project started as our Mechatronics Engineering graduation project in the German-Jordanian University. Quattrino or Quadrotor (which is the common name for it) is an aircraft classified as rotorcraft, lifted by four rotors and able to vertical take-off & landing (VTOL).” The project article has all the hardware, electrical and software details so go build your own!
Currently Hot
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Animatronics

Recent Articles
Arduino DDS Shield
build your own arduino based analog signal generator
A Digital Multimeter In Review (Tenma 72-7735)
learn about your typical digital multimeter in review
The PIC Annoy PCB
build something to annoy your co-workers
Automate Your Life With Cron
learn how to use cron for computer automation
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Motor Control via Infrared Distance Sensor
control a motor simply by waving your hand

