



Get started learning to build your own electronics by following our FREE online courses below!
Learn More »
Categories
- animatronics (12)
- apple (11)
- arduino (179)
- art (41)
- articles (121)
- artificial intelligence (11)
- automation (421)
- avr (205)
- bitcoin (3)
- breadboard (9)
- cameras (57)
- cars (26)
- cell phones (28)
- clothing mods (21)
- console mods (26)
- dangerous (94)
- desktop mods (24)
- embedded (5)
- flying things (54)
- fpga (22)
- gaming creations (108)
- interface (225)
- internet (17)
- laptop mods (6)
- lasers (22)
- linux (7)
- magnetic (3)
- medical (12)
- microcontrollers (51)
- misc projects (152)
- msp (12)
- music (124)
- pic (90)
- projects (23)
- pyroedu (76)
- raspberry pi (26)
- robots (312)
- security (36)
- sensors (307)
- software (200)
- solar (19)
- stamp (9)
- tools (149)
- tutorials (98)
- Uncategorized (45)
- usb (44)
- wireless (256)
Sponsors
Build Like A Pyro!
Find many of the parts used on this site at our favorite online electronics shop


QuadRotor UAV Flyer
Posted June 4, 2011 by Chris
Flying UAVs seem to be the ultimate challenge for robotics. Stabilizing the flyer is very difficult since you need to combine multiple sensors’ data into control loops. This article shows a successful build of a quadrotor and lists all parts used. A PID control loop is used for movement stability.
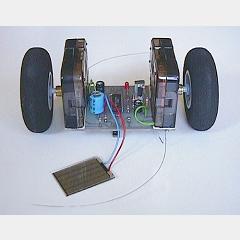
Smiley Driving Solar Robot
Posted June 1, 2011 by Chris
Solar powered robotics can be difficult to design, however this article gives a great example of how to make it work. The smiley solar powered robot uses differential drive motors with an analog brain to find its way. The article has the schematic and board layout available for download and describes how the robot works. Smile and build your own!

Give it a shot: Make your first robot!
Posted May 27, 2011 by Chris
Making your first robot should be a moment you remember as you progress in the electronics and robotics field. Whether it is a line follower or a wall dodger, it brings you to the first step into a larger world. Today’s article gives you a great starting point for how to build your first robot. Similar to my line follower, except with more digital circuity.
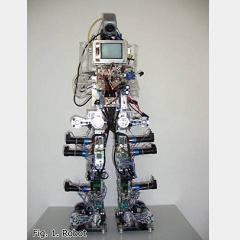
Humanoid Walking Machine [HWM]
Posted May 23, 2011 by Chris
Bipedal movement in robots is pretty rare because of the inherit difficulty of balance. IMU technology has slowly been advancing enough to bring us more humanoid type robots. The HWM is a fun look at what can be done with a little ingenuity and off-the-shelf parts. The article has great documentation for how this robot was built and a few action videos.
Galen’s OB2 Robot
Posted May 17, 2011 by Chris
Here is a bit of an older design for a mobile robot using the OOPic MCU. It uses a few sensors and a servo gripper to go around looking for the right color of block to pick up. The article describes in depth the hardware and software design of the robot so that you can duplicate any part of the OB2 robot.

Dunk’s Mobile Robot Platform
Posted May 9, 2011 by Chris
Here is a pretty sweet little robot that is a great resource for anyone looking to build their own mobile robotics platform. The article and google project is a documentation of a robot that combines together a mobile platform with various sensors for navigation and external sensory.

Miniature Flying Circuit Board
Posted May 4, 2011 by Chris
Quadcopters have been increasing in popularity in the robotics world because of their stability and ease of design. This project shows you how to make a remote control flying PCB. The motors are attached directly to the PCB! Since this project was made in 2000, it should be that much easier to make your own in 2011!

Little Brother Robot Walks
Posted May 3, 2011 by Chris
Here’s a small robot that uses a few servos to make it walk. At its heart is an AVR microcontroller and the rest of it is just make-shift parts. The article explains what parts were used and how everything fits together, but is a little light on details. Check out the action vid of the Little Brother walking!

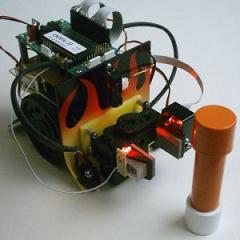
Yellow Drum Machine II
Posted April 26, 2011 by Chris
Mixing a little creativity with robotic fun brings us the second yellow drum machine robot. It uses a few sensors to find something that it can use as a drum and then goes to town. The article has all the details of how to build your own.

The Bilibot Project
Posted April 24, 2011 by Chris
This robotic project is an attempt to build an open source project with everyday products. The main sensor feedback comes from an Xbox Kinect, with a laptop for processing with the entire assembly ontop of a roomba-like device, making the system mobile. The project website is very transparent about how everything is being done, so no need to hunt for the details.
Currently Hot
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Animatronics

Recent Articles
Arduino DDS Shield
build your own arduino based analog signal generator
A Digital Multimeter In Review (Tenma 72-7735)
learn about your typical digital multimeter in review
The PIC Annoy PCB
build something to annoy your co-workers
Automate Your Life With Cron
learn how to use cron for computer automation
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Motor Control via Infrared Distance Sensor
control a motor simply by waving your hand

