



Get started learning to build your own electronics by following our FREE online courses below!
Learn More »
Categories
- animatronics (12)
- apple (11)
- arduino (179)
- art (41)
- articles (121)
- artificial intelligence (11)
- automation (421)
- avr (205)
- bitcoin (3)
- breadboard (9)
- cameras (57)
- cars (26)
- cell phones (28)
- clothing mods (21)
- console mods (26)
- dangerous (94)
- desktop mods (24)
- embedded (5)
- flying things (54)
- fpga (22)
- gaming creations (108)
- interface (225)
- internet (17)
- laptop mods (6)
- lasers (22)
- linux (7)
- magnetic (3)
- medical (12)
- microcontrollers (51)
- misc projects (152)
- msp (12)
- music (124)
- pic (90)
- projects (23)
- pyroedu (76)
- raspberry pi (26)
- robots (312)
- security (36)
- sensors (307)
- software (200)
- solar (19)
- stamp (9)
- tools (149)
- tutorials (98)
- Uncategorized (45)
- usb (44)
- wireless (256)
Sponsors
Build Like A Pyro!
Find many of the parts used on this site at our favorite online electronics shop


Unibot – 3D Stabilization
Posted January 18, 2012 by Chris
“The Unibot is a self balancing unicycle robot. This robot combines the principles of the famous wheeled inverted pendulum and inertia wheel pendulum. A well known application of the wheeled inverted pendulum is the Segway. The wheel on the ground is used to establish the stabilization in the y-z-plane. The wheel in the air is used to balance the robot in the x-z-plane.”

Areoquad: The Open Source Quadcopter
Posted January 13, 2012 by Chris
“AeroQuad hardware typically consists of an Arduino MCU as the flight controller board and an AeroQuad shield with various sensors, such as an accelerometer and gyroscope. AeroQuad software is written in C and uploaded to the MCU via the Arduino IDE. It currently supports an Acrobatic Mode that uses only the gyroscope for flight assistance, and a Stable Mode that uses the gyroscope and accelero-meter for leveled flight assist.”

PIC18F Based Line-Follower
Posted January 10, 2012 by Chris
“This was a second-year Embedded Systems Application Project at university. We were given the hardware and after assembling the robot, had to write firmware for it. The PIC MCU programming was done in C. As it was the first time this course was run, objectives were not concrete and were updated as students progressed. Some of the objectives were: follow a line, go over a ramp and memorize a track.”
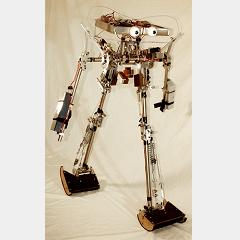
Research: Making Robots Walk Like Humans
Posted January 4, 2012 by Chris
“A simple Atmel microcontroller runs the high-level state machine that integrates simple sensor data and dictates behaviour of the motors and latches. Simple electrical relays (right side) act between the microcontroller and high-power electromechanical components.”

Open Automation Project
Posted December 13, 2011 by Chris
“The purpose of this project is to engineer modular software and electronic components, from which it is possible to assemble an intelligent mobile robot suitable for home/office environments. This project aims to fill the gap between the powerful mobile robot platforms typically used by researchers, and the small rug-roving robots with limited processing power that are popular with hobbyists.”

Wall-Climbing Ceiling-Walking Robot
Posted December 5, 2011 by Chris
“The goal of this project is to construct a digital controller for a w all climbing micro-robot. There are two kind of wall-climbing micro-robots in the lab. One is called ‘Flipper’, the other is called ‘Crawler’. The restrictions such as small size, light weight and low power consumption must be complied when designing the miniature robot.”

iPhone controlled Solar Powered Arduino Tank
Posted October 3, 2011 by Chris
“Using the super awesome TouchOSC app for the iPhone connected to Processing for converting Open Sound Control signals into serial commands send out via USB to an Xbee…I am able to drive a small tank.”

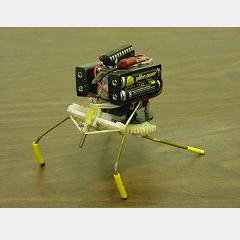
DIY Robot Spider (Eigenbau einer Roboterspinne)
Posted September 26, 2011 by Chris
This little spider (only 6 legs!) uses some sensors and a Stamp (or PIC) to navigate its way about the world. The article describes how it was built and the custom software that accompanies the project. Also, the article is in german so if you’re not a Deutscher/Österreicher/Schweizer be sure to google translate it.
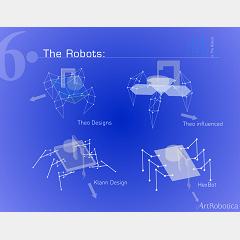
Design Different: Art Robotica
Posted September 23, 2011 by Chris
“Art Bots are autonomous machines that paint or draw on a canvas, sheet of paper or a surface of some kind. Systems that utilizes this concept are currently used widely to create generative or algorithmic art. Some Art Bots that were created, walk around the surface of a canvas and paint a composition predetermined by the image or video they use as reference.”
Single Motor Robotic Walker
Posted September 14, 2011 by Chris
The design of this little robo-walker is as simple as it gets, which means that it is easy to understand how it operates and even easier to build. Using only one motor, some gears and ingenuity this article, pulled from instructables, shows you how to build your own four legged walker. The action video below also shows you what to expect from the finished robot (it’s not on-par with imperial walkers, sorry >_<).
Currently Hot
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Animatronics

Recent Articles
Arduino DDS Shield
build your own arduino based analog signal generator
A Digital Multimeter In Review (Tenma 72-7735)
learn about your typical digital multimeter in review
The PIC Annoy PCB
build something to annoy your co-workers
Automate Your Life With Cron
learn how to use cron for computer automation
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Motor Control via Infrared Distance Sensor
control a motor simply by waving your hand

