



Get started learning to build your own electronics by following our FREE online courses below!
Learn More »
Categories
- animatronics (12)
- apple (11)
- arduino (179)
- art (41)
- articles (121)
- artificial intelligence (11)
- automation (421)
- avr (205)
- bitcoin (3)
- breadboard (9)
- cameras (57)
- cars (26)
- cell phones (28)
- clothing mods (21)
- console mods (26)
- dangerous (94)
- desktop mods (24)
- embedded (5)
- flying things (54)
- fpga (22)
- gaming creations (108)
- interface (225)
- internet (17)
- laptop mods (6)
- lasers (22)
- linux (7)
- magnetic (3)
- medical (12)
- microcontrollers (51)
- misc projects (152)
- msp (12)
- music (124)
- pic (90)
- projects (23)
- pyroedu (76)
- raspberry pi (26)
- robots (312)
- security (36)
- sensors (307)
- software (200)
- solar (19)
- stamp (9)
- tools (149)
- tutorials (98)
- Uncategorized (45)
- usb (44)
- wireless (256)
Sponsors
Build Like A Pyro!
Find many of the parts used on this site at our favorite online electronics shop


Ultrasonic + Line Sensor And Shell With SMAC 802.15.4
Posted June 4, 2013 by Chris
“With this I have an autonomous robot based on the FRDM-KL25Z board and a chassis from Pololu. It performs line following and maze solving, and can be controlled by a remote shell or controller unit (e.g. with an accelerometer).”

Junk + Arduino = Robot #2
Posted May 18, 2013 by Chris
“This was the second robot I made for collective motion research purposes. As you can see, it is vastly simpler, cheaper and easier to build. Of course it doesn’t have nearly as many features or as much potential as robot 1, but I think it is much better for what I’m trying to do.
Here’s a picture of the prototype without the battery.”

YARB 1.0 (Yet Another Robotic Blimp)
Posted May 7, 2013 by Chris
“My main objective in this project is to work on core computer vision algorithms which enable the blimp to navigate through its envirnment autonomously. The camera is the most important sensor – it provides continuous live image capture for onboard ‘optical flow’ calculations, a very effective technique for obstacle detection and velocity measurement.”
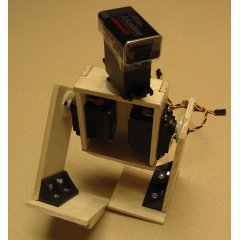
Robot 3S-1: A Three-Servo Biped Walker
Posted May 6, 2013 by Chris
“This project is my first attempt to make a biped walker — and using only three servos. 3S-1 (for Three-Servo walker One) is modelled loosely after the VStone RB300, as seen in their gallery and discussed in this RoboSavvy thread.”

Laser Cut Cardbot
Posted May 4, 2013 by Chris
“Cardbot is a functional robot made from laser-cut corrugated cardboard. It is battery powered and wirelessly controlled over 802.15.4 (Zigbee.)….I had the idea that I could build a kit for a robotic base, itself a press-fit assembly kit, that could also serve as a mobile base for other press-fit constructions.”

Modifying a Robot Arm With Arduino
Posted April 21, 2013 by Chris
“In this post I’m going to first alter a robot arm I had built previously from a beginners kit so that it can be controlled from Arduino. Then I’m going to write a series of posts on different ways to control the robot arm using Processing and other things.”

Freedom Robot – Maze Solver
Posted April 17, 2013 by Chris
“Finally I have found some time over the past week-end to enhance my Zumo robot. After I had my line following robot based on the Pololu Zumo chassis and the FRDM-KL25Z, I thought it should be easy and logical to solve a maze. Logical: yes. Easy: not that much. In fact it took me longer than expected. As always, there are a lot of tiny and important problems to solve.”

An Advanced Line Following Robot With PID control
Posted April 10, 2013 by Chris
“This tutorial details the process of building a line following robot. The robot can follow both black and white lines. It uses a sensor array to sense the line and a PID control to follow the line.”

Cardboard Plotter
Posted April 3, 2013 by Chris
“When I gave a workshop at the School of Art and Design in Offenbach about building digital devices out of cardboard, the students asked me to build a machine as well. I always wanted to own a plotter – so I didn’t have to think too long about what exactly I’d build.”

Urban Tapestries – Feral Robot Client Architecture
Posted April 2, 2013 by Chris
“This report provides technical documentation for a prototype mobile environmental sensor that integrates with the Urban Tapestries public authoring system — the Feral Robot, version 2. Descriptions of the main requirements, as well as the steps in the hardware/software platform development are presented.”
Currently Hot
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Animatronics

Recent Articles
Arduino DDS Shield
build your own arduino based analog signal generator
A Digital Multimeter In Review (Tenma 72-7735)
learn about your typical digital multimeter in review
The PIC Annoy PCB
build something to annoy your co-workers
Automate Your Life With Cron
learn how to use cron for computer automation
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Motor Control via Infrared Distance Sensor
control a motor simply by waving your hand

