



Get started learning to build your own electronics by following our FREE online courses below!
Learn More »
Categories
- animatronics (12)
- apple (11)
- arduino (179)
- art (41)
- articles (121)
- artificial intelligence (11)
- automation (421)
- avr (205)
- bitcoin (3)
- breadboard (9)
- cameras (57)
- cars (26)
- cell phones (28)
- clothing mods (21)
- console mods (26)
- dangerous (94)
- desktop mods (24)
- embedded (5)
- flying things (54)
- fpga (22)
- gaming creations (108)
- interface (225)
- internet (17)
- laptop mods (6)
- lasers (22)
- linux (7)
- magnetic (3)
- medical (12)
- microcontrollers (51)
- misc projects (152)
- msp (12)
- music (124)
- pic (90)
- projects (23)
- pyroedu (76)
- raspberry pi (26)
- robots (312)
- security (36)
- sensors (307)
- software (200)
- solar (19)
- stamp (9)
- tools (149)
- tutorials (98)
- Uncategorized (45)
- usb (44)
- wireless (256)
Sponsors
Build Like A Pyro!
Find many of the parts used on this site at our favorite online electronics shop

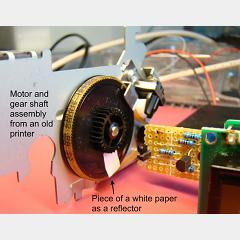
Contact-less Infrared Digital Tachometer
Posted January 17, 2012 by Chris
“The contact with the rotating shaft is avoided with an optical sensing mechanism that uses an infrared (IR) light emitting diode and a photo detecting diode. The IR LED transmits an infrared light towards the rotating disc and the photo detecting diode receives the reflected light beam. This special arrangement of sensors is placed at about an inch away and facing towards the rotating disc.”

PACKit – Serial to Ethernet Development System
Posted January 16, 2012 by Chris
“The idea of building an RS232 to Ethernet bridge seemed like a great way to begin learning about embedded system design. Having created a working sample, though it was left with my teammate after graduation, I decided to recreate the project with more features and higher reliability. The project was later renamed from ‘STEDS’ to ‘NI-1’ (Network Interface 1) and finally ‘Pack-it’. Pack-it is based on a Motorola MC9S12 MCU and a CS8900A Cirrus Ethernet controller.”

PIC18F Based Line-Follower
Posted January 10, 2012 by Chris
“This was a second-year Embedded Systems Application Project at university. We were given the hardware and after assembling the robot, had to write firmware for it. The PIC MCU programming was done in C. As it was the first time this course was run, objectives were not concrete and were updated as students progressed. Some of the objectives were: follow a line, go over a ramp and memorize a track.”

HCS12 VGA generator
Posted December 23, 2011 by Chris
“My implementation produces 640×480 signals, but the display is limited to 80×60 blocks…the HCS12 bus can run at 25MHz max, and it takes at least 5 bus cycles to write a byte to an I/O port. For normal VGA, pixels must be written out at a rate of 25MHz.”

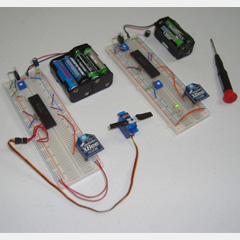
Xbee Wireless Servo Control
Posted December 22, 2011 by Chris
Today’s article shows you how to build a basic wireless input and output system in the form of a single transmitter and single receiver. Communication is one way to keep things simple with two xbee modules being used for the wireless link. In the end, a small trimpot will control the movement of a servo motor.
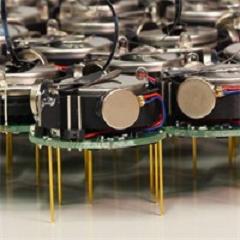
Light Reading: Build A Kilobot Swarm
Posted December 18, 2011 by Chris
“The robot design allows a single user to easily oversee the operation of a large Kilobot collective, such as programming, powering on, and charging all robots, which would be difficult or impossible to do with many existing robotic systems. The researchers demonstrate the capabilities of the Kilobot as a collective robot, using a 29 robot test collective to implement some popular swarm behaviors.”

AVR Based Digital Thermometer with Nokia 3310 LCD and Thermistor
Posted December 16, 2011 by Chris
“This project shows how to use a simple thermistor to measure temperature and display the temperature graphically on a Nokia 3310 LCD. Thermistors are incredibly cheap (about 50 cents), and provide fractions of a degree accuracy.”
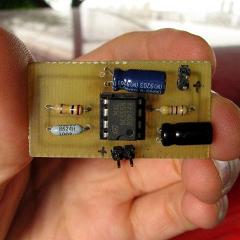
Fake Car Alarm Circuit – 555 tutorial
Posted December 14, 2011 by Chris
“This page outlines how to make a simple theft detterant which may be just as effective. The idea is to have a flashing red led indicate that your car is protected. This device can protect your vehicle from potential thieves – it makes it look like your car has an armed alarm system installed, which causes thieves to pass by your car in search of an easier target.”

Open Automation Project
Posted December 13, 2011 by Chris
“The purpose of this project is to engineer modular software and electronic components, from which it is possible to assemble an intelligent mobile robot suitable for home/office environments. This project aims to fill the gap between the powerful mobile robot platforms typically used by researchers, and the small rug-roving robots with limited processing power that are popular with hobbyists.”
3D Scanner Prototyping
Posted December 10, 2011 by Chris
“How does it work? A digital camera is placed in phonographic rotational axes and records laser light reflections from object’s surfaces (it works better in the dark). Distortion of laser line corresponding to object’s deformations derive the location from the laser source. Constant rotational speed and precise measurment are very important.”
Currently Hot
Arduino LED Flashing Introduction
begin your journey learning about the arduino here
Wireless XBee Motor Control
wireless dual dc motor control via xbee
DIY Mini PIC Development Board
build your own quick, easy and awesome pic dev board
Wireless XBee Pan/Tilt With Servos
build a wireless pan/tilt system for your camera
PIC Prototyping: MPLABX + PICKIT3 Intro
learn how to use mplabx with the new pickit3
Animatronics

Recent Articles
Arduino DDS Shield
build your own arduino based analog signal generator
A Digital Multimeter In Review (Tenma 72-7735)
learn about your typical digital multimeter in review
The PIC Annoy PCB
build something to annoy your co-workers
Automate Your Life With Cron
learn how to use cron for computer automation
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Motor Control via Infrared Distance Sensor
control a motor simply by waving your hand

