



Get started learning to build your own electronics by following our FREE online courses below!
Learn More »
Categories
- animatronics (12)
- apple (11)
- arduino (179)
- art (41)
- articles (121)
- artificial intelligence (11)
- automation (421)
- avr (205)
- bitcoin (3)
- breadboard (9)
- cameras (57)
- cars (26)
- cell phones (28)
- clothing mods (21)
- console mods (26)
- dangerous (94)
- desktop mods (24)
- embedded (5)
- flying things (54)
- fpga (22)
- gaming creations (108)
- interface (225)
- internet (17)
- laptop mods (6)
- lasers (22)
- linux (7)
- magnetic (3)
- medical (12)
- microcontrollers (51)
- misc projects (152)
- msp (12)
- music (124)
- pic (90)
- projects (23)
- pyroedu (76)
- raspberry pi (26)
- robots (312)
- security (36)
- sensors (307)
- software (200)
- solar (19)
- stamp (9)
- tools (149)
- tutorials (98)
- Uncategorized (45)
- usb (44)
- wireless (256)
Sponsors
Build Like A Pyro!
Find many of the parts used on this site at our favorite online electronics shop


The Finch – A Robot For Education
Posted February 11, 2013 by Chris
“The Finch is a new robot for computer science education. Its design is the result of a four year study at Carnegie Mellon’s CREATE lab. The Finch is designed to support an engaging introduction to the art of programming. It has support for over a dozen programming languages and environments, including several environments appropriate for students as young as eight years old.”

Bluebell/Parallax Sensor Bot
Posted February 9, 2013 by Chris
Here we have a quick and simple picture walk through of how to construct a hardcore Sensor Bot. The main processing components are from Bluebell and the rest of the intelligent components came from Parallax. The chassis and interconnects are all home-designed and built together. Enjoy!

Mobile RGB LED Panel
Posted February 4, 2013 by Chris
“The RGB panel is a new module designed to be suitable for the e-puck robot. It is comprised of: 9 RGB LEDs, 8 infrareds and a PIC 18F6722. Every LED is independent from each other, so it’s possible to turn on the LEDs with different colors in the RGB color space (additive color mixing).”
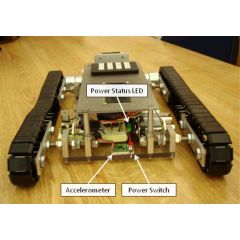
A Versatile PIC Based Robot [pdf]
Posted February 3, 2013 by Chris
“Our group designed and manufactured a miniature robotic vehicle that conquers various terrains. The vehicle was designed with a track system which is powered by two DC motors. The motors use a Quadruple half H-Driver in order to drive the motors in both directions….These configurations allow the vehicle to drive on various terrains. ”

The CHORG Project – Robotic Arm
Posted January 31, 2013 by Chris
“The CHORG project consists in both a hardware and software platform both of them developed by myself. The main purpose of this project is to create a robot arm capable of adapting a task to randomness of the real environment. While the hardware’s imperfections serve as good way measure the randomness the software purpose is to adapt that and allow it to successfully perform a certain task.”

FlockBots – Open Source Swarmbots
Posted January 26, 2013 by Chris
“This website describes an open design for a small, $800 robot suitable for swarm-style multiagent research, robotics education, and other tasks. Our goal is to get as much functionality as possible from $800 per robot, replicate the robot many times to create a small collaborative swarm, and document the results to make it easier for you to do the same.”

Felix @ Daddio Robotics
Posted January 22, 2013 by Chris
“Felix is one of the first robots I created using the kinect sensor. Felix uses NPC Robotics 24V Electric Gear Motor Set – R81, R82. they are basically wheelchair motors. With 10? solid wheels and custom aluminum hubs. For the Robot Stroller kit I use 2 of the Jazzy Select Elite, Coupled with 2 of the 12 inch tires.”

Real-time Controlled Robotic Arm
Posted January 20, 2013 by Chris
“I had always wanted to create a robotic arm and control it with a joystick or something. I had also recently been playing around with the open source 3D program, Blender 2.49 (this does not work in Blender 2.5+). After realizing the potential of Blender’s built in Python scripting capabilities, I figured why not let Blender control it!…So I did!”

Solar Powered Picaxe Microbot (Vibrobot)
Posted January 16, 2013 by Chris
“This is a small solar powered progammable robot. It’s design was inspired by BEAM robots, but whereas those devices are usually entirely hardware based, I favor systems which rely on software. Allowing programmability, however basic, introduces a whole new level of flexibility.”

Tracked Mobile Robot
Posted December 25, 2012 by Chris
“The aim is to build a robot system that uses the newly introduced depth cameras (RGB-D) to perform a variety of tasks. The core tasks are to map and localise in an unknown environment without a prior knowledge and to recognise 3D objects using only curvature information. The robot is also able to take the current map available and use that to calculate a path from point A to B avoiding any obstacles.”
Currently Hot
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Animatronics

Recent Articles
Arduino DDS Shield
build your own arduino based analog signal generator
A Digital Multimeter In Review (Tenma 72-7735)
learn about your typical digital multimeter in review
The PIC Annoy PCB
build something to annoy your co-workers
Automate Your Life With Cron
learn how to use cron for computer automation
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Motor Control via Infrared Distance Sensor
control a motor simply by waving your hand

