



Get started learning to build your own electronics by following our FREE online courses below!
Learn More »
Categories
- animatronics (12)
- apple (11)
- arduino (179)
- art (41)
- articles (121)
- artificial intelligence (11)
- automation (421)
- avr (205)
- bitcoin (3)
- breadboard (9)
- cameras (57)
- cars (26)
- cell phones (28)
- clothing mods (21)
- console mods (26)
- dangerous (94)
- desktop mods (24)
- embedded (5)
- flying things (54)
- fpga (22)
- gaming creations (108)
- interface (225)
- internet (17)
- laptop mods (6)
- lasers (22)
- linux (7)
- magnetic (3)
- medical (12)
- microcontrollers (51)
- misc projects (152)
- msp (12)
- music (124)
- pic (90)
- projects (23)
- pyroedu (76)
- raspberry pi (26)
- robots (312)
- security (36)
- sensors (307)
- software (200)
- solar (19)
- stamp (9)
- tools (149)
- tutorials (98)
- Uncategorized (45)
- usb (44)
- wireless (256)
Sponsors
Build Like A Pyro!
Find many of the parts used on this site at our favorite online electronics shop

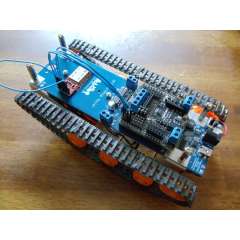
Robot Controlled By Android Phone
Posted July 18, 2013 by Chris
“We decided a few weeks ago to use the Android as a remote controller instead of building a remote control from scratch. We had started developing our android controller with Google Labs App Inventor but one of the guys over at LMR did the same thing and put it on Android Market for $2. So we decided to use Chris the Carpenter’s RocketBot Controller.”

Mini Robotic Arm: Wood, Serovs and Plastic
Posted July 15, 2013 by Chris
“Time to build: 10 hours, Weight: 65 grams,
Actuators / output devices: 4 micro servos,
Control method: controlled by a PIC16F690 assembler firmware,
CPU: PIC16f690 micro controller
Power source: 4.8V to 6V from 4 battery cells
Sensors / input devices: teach in system with 4 potentiometers”

The RobOrchestra Project
Posted July 13, 2013 by Chris
“The RobOrchestra Project seeks to create instruments that can not only play themselves, but also work together to create their own music. The ultimate goal is to create a full band, with at least one instrument to cover the roles of Soprano, Alto, Tenor, Bass, and Rhythm.”

Autonomous Directional Rotary Artificial Intelligence Navigational System
Posted June 27, 2013 by Chris
“Our final project in ECE 476 is a mobile robot with a developed neural network such that it evolves to avoid collisions into a circular vertical white wall while traveling at the fastest speed and straightest line possible without human intervention or external computers.”

CNC Prototype Machine (Arduino/Easy Driver)
Posted June 18, 2013 by Chris
“In my spare time I have been working on a tiny two axis CNC machine that will be powerful enough to move a pen around like a plotter. Future versions will be larger and handle more powerful tools, but this is a good start to work out the kinks.”

MechBass – Hysteria
Posted June 17, 2013 by Chris
“MechBass was the outcome of my Engineering honors project at Victoria University of Wellington in 2012, more info about Engineering at VUW: http://ecs.vuw.ac.nz….Design and Implementation details available for download.”

A Robot Designed by a Machine
Posted June 16, 2013 by Chris
“I’ve been working on some new features that allow not only automatic schematic generation, but also complete board layout. I made a little Bluetooth robot to test it out. Or rather, I asked my computer to design one for me.”

Arty the Robot
Posted June 14, 2013 by Chris
“I decided to build a more modern robot using current technology and parts as the world of robotics has gone through tremendous change in the last 15 years! These notes go over the design thoughts and ideas of this new robot and hopefully serves as a guideline or better yet, inspiration for someone else wanting to do the same. ”

RoboBees
Posted June 13, 2013 by Chris
“Prototyped in Summer of 2010, this sensor weights 125 milligrams, this mass including optics, image sensing, and processing using an ATtiny processor. Details may be found at this post on Embedded Eye. The image sensor is a Centeye Tamalpais chip- two versions are available, with resolutions of 16×16 and 8×8 on a focal plane about 450um wide.”

Watch Controlled Robot
Posted June 8, 2013 by Chris
“The accelerometer om the watch controls the vehicle. Tilt the watch forward and the robot moves forward. Tilt the watch to the side, and the robot turns. The left top and bottom buttons control the grabber.”
Currently Hot
Automate Your Life With Cron
learn how to use cron for computer automation
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
Animatronics

Recent Articles
Arduino DDS Shield
build your own arduino based analog signal generator
A Digital Multimeter In Review (Tenma 72-7735)
learn about your typical digital multimeter in review
The PIC Annoy PCB
build something to annoy your co-workers
Automate Your Life With Cron
learn how to use cron for computer automation
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Motor Control via Infrared Distance Sensor
control a motor simply by waving your hand

