



Get started learning to build your own electronics by following our FREE online courses below!
Learn More »
Categories
- animatronics (12)
- apple (11)
- arduino (179)
- art (41)
- articles (121)
- artificial intelligence (11)
- automation (421)
- avr (205)
- bitcoin (3)
- breadboard (9)
- cameras (57)
- cars (26)
- cell phones (28)
- clothing mods (21)
- console mods (26)
- dangerous (94)
- desktop mods (24)
- embedded (5)
- flying things (54)
- fpga (22)
- gaming creations (108)
- interface (225)
- internet (17)
- laptop mods (6)
- lasers (22)
- linux (7)
- magnetic (3)
- medical (12)
- microcontrollers (51)
- misc projects (152)
- msp (12)
- music (124)
- pic (90)
- projects (23)
- pyroedu (76)
- raspberry pi (26)
- robots (312)
- security (36)
- sensors (307)
- software (200)
- solar (19)
- stamp (9)
- tools (149)
- tutorials (98)
- Uncategorized (45)
- usb (44)
- wireless (256)
Sponsors
Build Like A Pyro!
Find many of the parts used on this site at our favorite online electronics shop

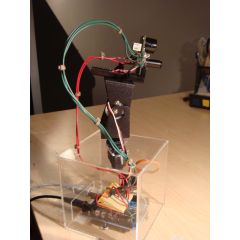
Arduino Thermal Camera
Posted November 13, 2012 by Chris
“The device works by sweeping a grid of points and assembles the image piecewise. The output consists of two images: [1] an acoustic images which tells the distance to the objects in view and [2] a thermal image that gives the temperature of the objects in view. I use gnuplot to assemble the images.”

Simple FPGA Controlled Robot
Posted November 12, 2012 by Chris
“This page outlines the complete design for Field Programmable Gate Array (FPGA) controlled robot that exhibits light following, sound sensing, and object detecting abilities. The robot uses an Actel 1020B FPGA to control all of its logic behaviour while external analog circuitry provides the sensory inputs to the FPGA. The purpose of this design is to demonstrate how an FPGA can be effectively used to control a robot.”

Logic Analyzer On PicKit2
Posted November 11, 2012 by Chris
“Pretty much every time I tried to work with some sort of digital interface I run into some kind of trouble where a logic analyzer would have saved me hours of blind debugging and posting to various forums….It was the first time I worked with SPI on a pic32 and as expected nothing worked for the first try.”
Analog audio panel for PC
Posted November 10, 2012 by Chris
“What if you had the audio control panel, the dialog in most PCs where you fiddle audio, right next to your PC in physical form? With analog controls, VU meters and input/output selection present for instant access on your desk, you will have the pleasure of controlling them by hand.”
MMC/SD/SDHC AVR Interface
Posted November 9, 2012 by Chris
“This project provides a general purpose library which implements read and write support for MMC, SD and SDHC memory cards. It includes: low-level MMC, SD and SDHC read/write routines, partition table support and a simple FAT16/FAT32 read/write implementation.”

PyroEDU Lesson 3 – The Resistor – Now Live!
Posted November 8, 2012 by Chris
Last week, we released the second lesson of the first PyroEDU course: An Introduction To Modern Electronics. This week we’re introducing the first and most basic circuit component: The Resistor. The resistor is the first fundamental component that anyone studies when they start learning about electronics. Ideas like what is an insulator or a conductor are introduced and related to electrical resistance.


How To Build An 8x8x8 LED Cube
Posted November 8, 2012 by Chris
“In this article, we’ll be constructing the Club Jameco Kit: The 8x8x8 LED Cube and providing an informal critique of the kit. In this way, you’ll be able to see both, how it has all the parts you need to build an 8x8x8 LED Cube, but also how to steer clear of the many pitfalls that exist when building a project of this complexity.”

DIY Micro Table Saw
Posted November 7, 2012 by Chris
“Some time ago I was working on my cnc lathe and got tired of my options to cut stock, so I decided I needed a mini table saw before continuing. Proxxon micro table saw seemed to be exactly what I needed, but I chose to make my own instead!”

I2C Tiny USB
Posted November 6, 2012 by Chris
“The i2c-tiny-usb project is an open source/open hardware project. The goal of i2c-tiny-usb is to provide a cheap generic i2c interface to be attached to the usb. It is meant as a replacement for those simple and cheap printer port to i2c adapters. A USB solution has several advantages incl. the built-in power supply and a more future proof interface.”

Theobald – The Self-Balancing Robot
Posted November 5, 2012 by Chris
“The idea of this project was to design and construct a robot that consists of a body and two wheels that would be able to balance on its own. This behavior is similar how a segway (a new mode of transportation) works. Our goal was to have a working finished product – a robot that, without human interaction, could balance on two wheels.”
Currently Hot
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Animatronics

Recent Articles
Arduino DDS Shield
build your own arduino based analog signal generator
A Digital Multimeter In Review (Tenma 72-7735)
learn about your typical digital multimeter in review
The PIC Annoy PCB
build something to annoy your co-workers
Automate Your Life With Cron
learn how to use cron for computer automation
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Motor Control via Infrared Distance Sensor
control a motor simply by waving your hand

