Project Info
Author: Chris
Difficulty: Medium
Time Invested: 5 Hours
Prerequisites:
Take a look at the above
tutorials before continuing
to read this tutorial.
Author: Chris
Difficulty: Medium
Time Invested: 5 Hours
Prerequisites:
Take a look at the above
tutorials before continuing
to read this tutorial.
This tutorial will present a single method for controlling 2-axis of robotic eye movement using an improvised gimbal system. This will give us control for the animatronic eyes to move up and down as well as left and right, just like a human's eye. Four micro Servo Motors will be used to actuate these movements in the eye.
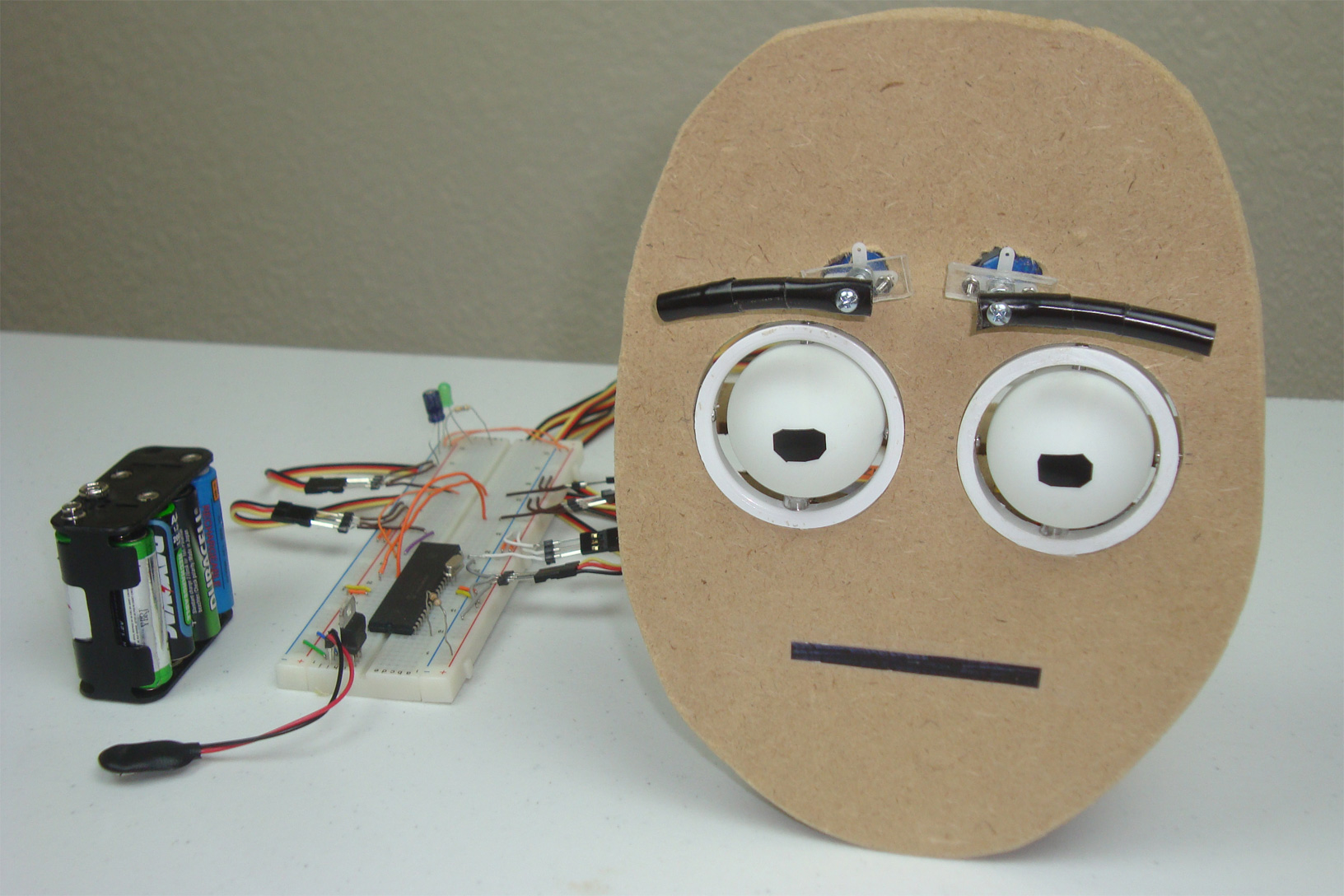
Purpose & Overview of this project
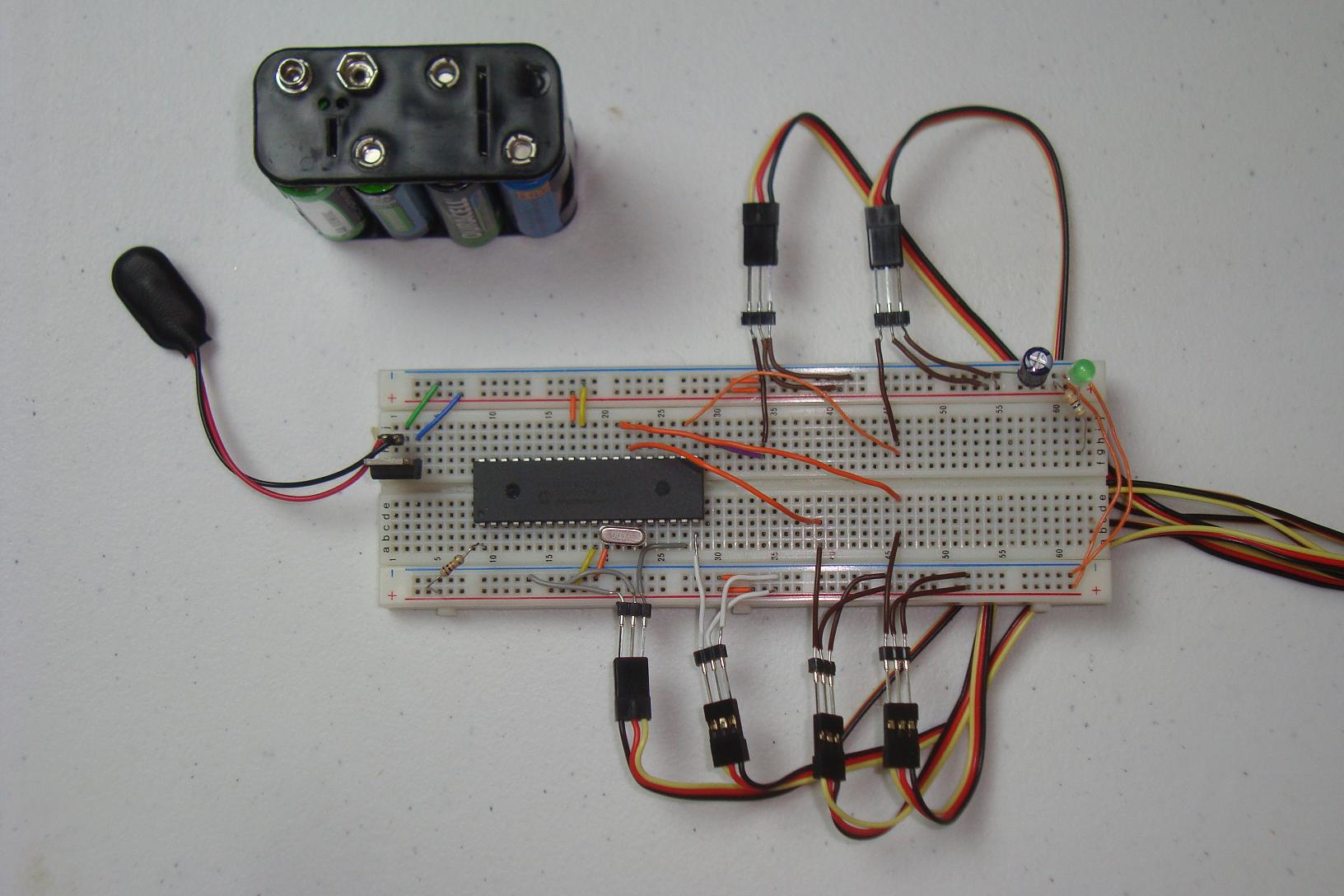
The goal of this tutorial is to build two animatronic eyes that can mimic the movement of a human's eye. Each eye should be controlled by two servo motors, with each motor controlling one axis of animatronic eye movement. A PIC microcontroller will be used to control all four (six including the eyebrows) servo motors with pre-programmed movements.
Similar to how the robotic eyebrows were created, these animatronic eyes will use simple acrylic plastic and MDF for building material with nuts and bolts to hold things together. A ping-pong ball will be used for the eye, with a pupil colored in by a black marker or electrical tape.