There are two main portions of code that we are concerned with:
-Opening The Serial USART Comm.
-Receiving, Executing the Command
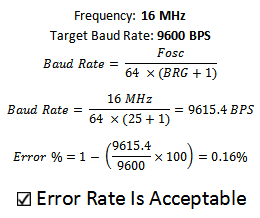
The first portion of the code I want to share with you is how to setup the PIC's built in hardware USART. It requires a few specific functions that can set it up many different ways. The most important of which is how to calculate the communication speed, baud rate:
Opening The Serial USART Comm.
------------« Begin Code »------------
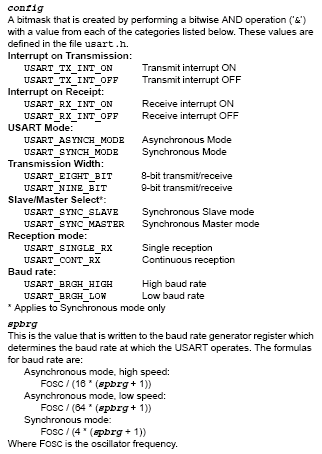
.. .... .... OpenUSART( USART_TX_INT_OFF & USART_RX_INT_OFF & USART_ASYNCH_MODE & USART_EIGHT_BIT & USART_CONT_RX & USART_BRGH_LOW, 25 ); .... .. ..
------------« End Code »------------
This single function determines whether interrupts are triggered on a full 8 bit receive or transmit, what type of communication 8-bit or 9-bit, what type of reception (continuous,single) and the baud rate. The C18 libraries define these properties in detail:
Receiving and Executing Commands
------------« Begin Code »------------
..
...
while(1){
//If New Character Input, Update Output Buffer Value
if(previous_input_buf != current_input_buf){
switch(current_input_buf){
case '0' : output_buf = 0x00;
input_set=1;
break;
..
...
..
}
}
//Update PORTB LED Outputs
PORTB = output_buf;
Delay10KTCYx(20);
current_input_buf = getcUSART();
}
...
..
------------« End Code »------------
The hardware USART in the PIC takes care of all the low-level reception work and so we will use a short polling routine to see when new data arrives. When new data has arrived (previous_character != current_character) the correlating command is executed through the switch statement. This loop continues over and over, forever until the battery dies out. There you have it, the software for a simplistic serial rs232 interface, now let's test it out!