An Overview Of The Building A Robot: Motor Control
Motor control is the basic element for Building A Robot and telling your robot what to do and when. At this point we can only set in commands and so as of yet, no real intelligence exists behind the movement of our robot. However, timed delays let us tell the robot to make predicatable movements to prove that the platform is capable of being reliably mobile.
What To Do Now
Since this is only the second part in a five part series of Building A Robot the next step is naturally to move on to Part 3: The Proximity Sensor. What we need to do next is to add some type of input and sensors to our robot so that it can sense something about the real world and react to it appropriately.
Conclusion
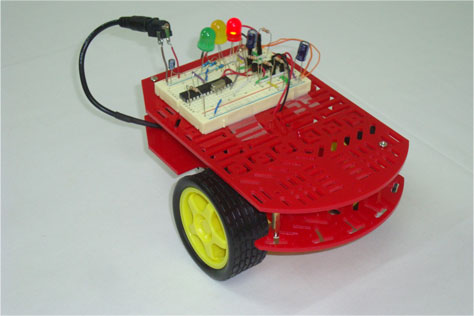
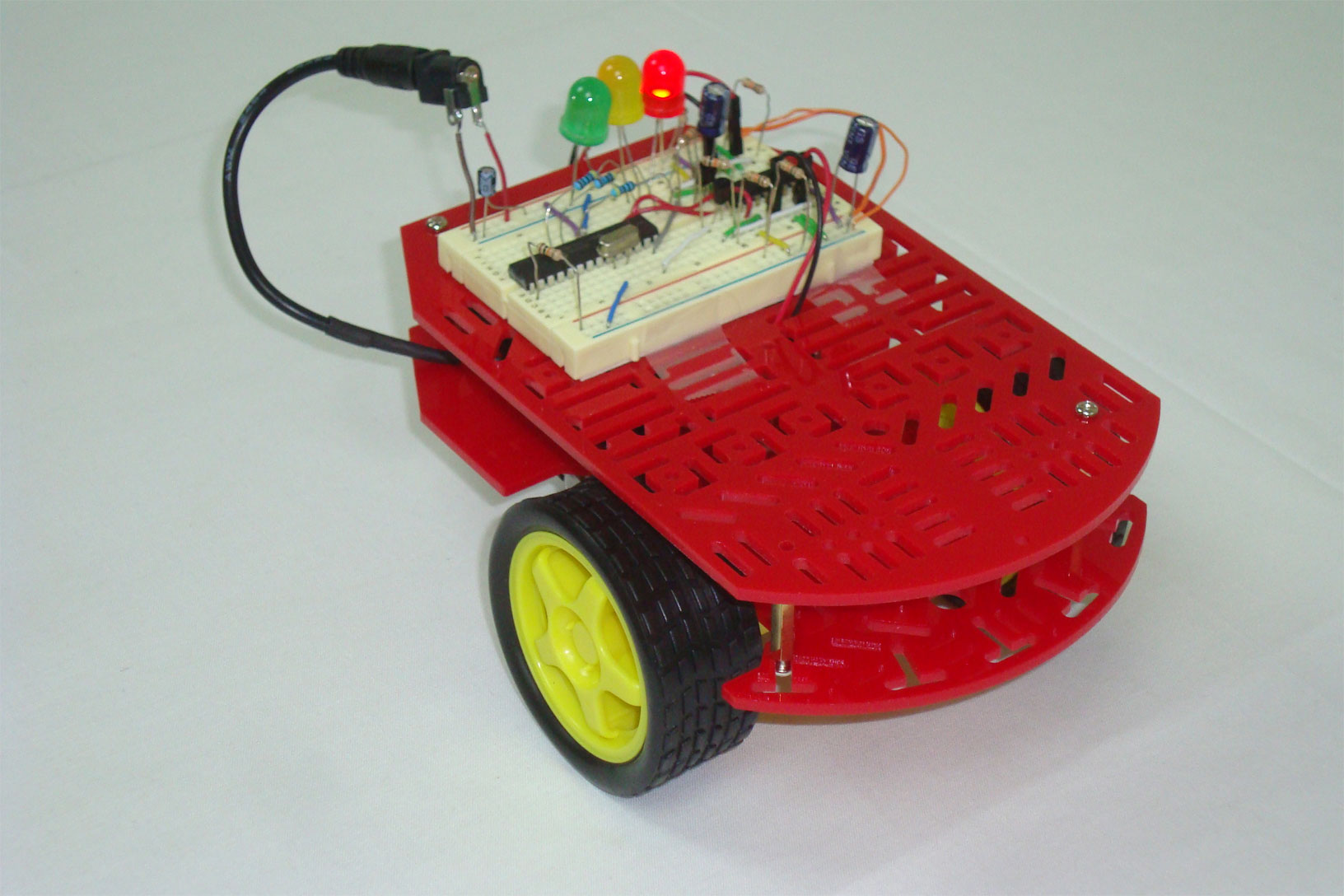
This project was meant to add a microcontroller and a motor controller to the robotic chassis so that we could control the platform. The pre-programmed moves were executed by the robot in a fashion exactly as desired and so I'm happy to say all the goals set out in the purpose were reached. Hurray!
If you have any further questions, I implore you...don't be shy, take a look at the forums or ask a question there. I check them out regularly and love getting comments & questions.
Motor control is the basic element for Building A Robot and telling your robot what to do and when. At this point we can only set in commands and so as of yet, no real intelligence exists behind the movement of our robot. However, timed delays let us tell the robot to make predicatable movements to prove that the platform is capable of being reliably mobile.
What To Do Now
Since this is only the second part in a five part series of Building A Robot the next step is naturally to move on to Part 3: The Proximity Sensor. What we need to do next is to add some type of input and sensors to our robot so that it can sense something about the real world and react to it appropriately.
Conclusion
This project was meant to add a microcontroller and a motor controller to the robotic chassis so that we could control the platform. The pre-programmed moves were executed by the robot in a fashion exactly as desired and so I'm happy to say all the goals set out in the purpose were reached. Hurray!
If you have any further questions, I implore you...don't be shy, take a look at the forums or ask a question there. I check them out regularly and love getting comments & questions.