The TMCM IDE
The stepRocker is more than just a direct motor controller board, it's programmable. On the TMCM-1110's main information page at Trinamic's website they have a ton of good information that explains about how to get started with the stepper motor controller and beyond. The part we want to focus on here is the TMCL firmware language that we can use to programmatically tell the TMCM-1110 what to do.

To use the more advanced programming option with the stepRocker you need to get the TMCM-IDE which you can find and download off of Trinamic's website. Along with the IDE, you can download many examples, app-notes and manuals related to how the IDE is used with various Trinamic motor controller boards.
The TMCM-IDE (IDE = Integrated Developement Enviornment) is downloaded either through an executable or in a zip file. I got the zip file and unzipped it right onto my desktop. Inside the zip you get the main TMCM-IDE enviornment and a folder full of examples.

If you plan to connect your TMCM-1110 through the USB interface, you'll need to grab the TMCM-1110.inf as well so windows knows how to communicate with the board. Once you open the IDE, it is actualy super simple. A few buttons are used for assembling the program, downloading it and running it. Here is an example program with some comments:
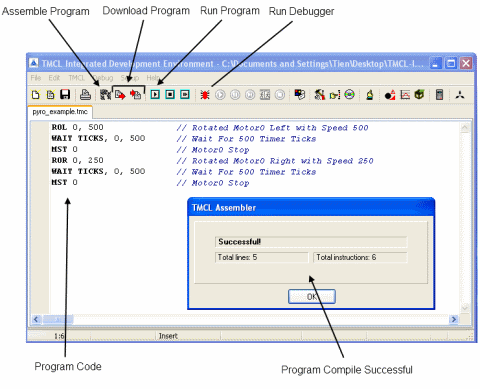
If you have experience programming in assembly or C then their IDE should seem pretty natural to you. It's not over-complicated in and way which is what you typically want from a dedicated IDE like this one. Now let's get going with the real stuff, and see how to build up a setup with limit switches and what code we'll need for that.
The stepRocker is more than just a direct motor controller board, it's programmable. On the TMCM-1110's main information page at Trinamic's website they have a ton of good information that explains about how to get started with the stepper motor controller and beyond. The part we want to focus on here is the TMCL firmware language that we can use to programmatically tell the TMCM-1110 what to do.

To use the more advanced programming option with the stepRocker you need to get the TMCM-IDE which you can find and download off of Trinamic's website. Along with the IDE, you can download many examples, app-notes and manuals related to how the IDE is used with various Trinamic motor controller boards.

The TMCM-IDE (IDE = Integrated Developement Enviornment) is downloaded either through an executable or in a zip file. I got the zip file and unzipped it right onto my desktop. Inside the zip you get the main TMCM-IDE enviornment and a folder full of examples.

If you plan to connect your TMCM-1110 through the USB interface, you'll need to grab the TMCM-1110.inf as well so windows knows how to communicate with the board. Once you open the IDE, it is actualy super simple. A few buttons are used for assembling the program, downloading it and running it. Here is an example program with some comments:

If you have experience programming in assembly or C then their IDE should seem pretty natural to you. It's not over-complicated in and way which is what you typically want from a dedicated IDE like this one. Now let's get going with the real stuff, and see how to build up a setup with limit switches and what code we'll need for that.