The Servo Mouth Theory
This section on the theory for the two different animatronic mouths will be broken into two parts. First I will describe how the articulated animatronic mouth should work and then I'll describe how the LCD mouth should work. Luckily this time, the theory is not too difficult to grasp and for anyone who has watched their fair share of movies, it should be quite clear.
Mouth Movements (English Language)
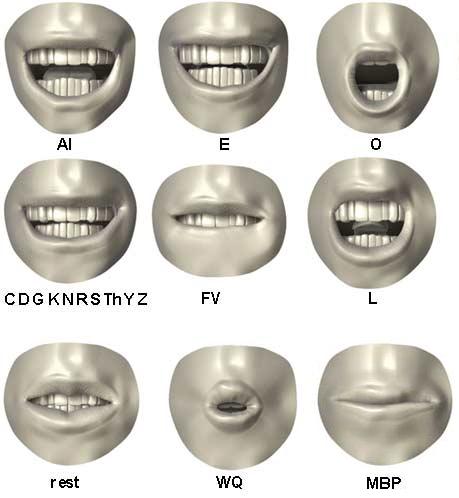
The picture above illustrates the many ways a native english speaker (USA or British) would move their mouth while talking. Given that we are aiming for only up and down, 1 axis movement, it is obvious we cannot simulate all of these mouth movements, however many of them we can and so we will use this to our advantage. To 'fool' the viewer, a simple thing we can do is make the matching movements more obvious and the mismatching O's and M's less prominent while the animatronic mouth talks. Think of how people use sock puppets and you won't be far off from how this idea is implememented.
Animatronic Mouth Movement via Servo Motor
When building an animatronic mouth as simple as this one, you have to consider how it should move. A human's jaw doesn't move straight up and down, it moves at an angle like the animation seen above. For our design we will try our best to mimic an angular movement, to better match the way a human's mouth moves up and down. Luckily, servos move in a similar circular/angular path so it shouldn't be too far off. A linear straight up and down motion would be better for a full-fledged robot that isn't trying to duplicate any human traits.
This section on the theory for the two different animatronic mouths will be broken into two parts. First I will describe how the articulated animatronic mouth should work and then I'll describe how the LCD mouth should work. Luckily this time, the theory is not too difficult to grasp and for anyone who has watched their fair share of movies, it should be quite clear.
The picture above illustrates the many ways a native english speaker (USA or British) would move their mouth while talking. Given that we are aiming for only up and down, 1 axis movement, it is obvious we cannot simulate all of these mouth movements, however many of them we can and so we will use this to our advantage. To 'fool' the viewer, a simple thing we can do is make the matching movements more obvious and the mismatching O's and M's less prominent while the animatronic mouth talks. Think of how people use sock puppets and you won't be far off from how this idea is implememented.
When building an animatronic mouth as simple as this one, you have to consider how it should move. A human's jaw doesn't move straight up and down, it moves at an angle like the animation seen above. For our design we will try our best to mimic an angular movement, to better match the way a human's mouth moves up and down. Luckily, servos move in a similar circular/angular path so it shouldn't be too far off. A linear straight up and down motion would be better for a full-fledged robot that isn't trying to duplicate any human traits.