Schematic Overview
The schematic at this point is purely oriented around connecting the two motors on the magician chassis to the power supply on the breadboard. The different configurations below give some examples for how you can connect the power supply to the motors, and the resulting effect on how the robot will move.
Schematic Specifics
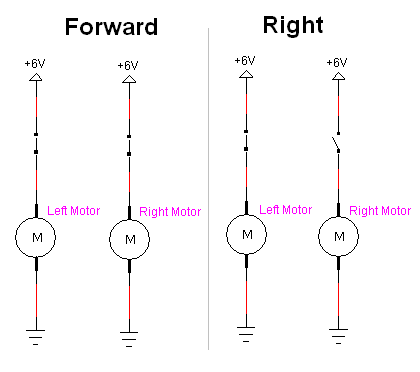
Forward
When both motors are connected directly to the battery, the chassis moves forward at full speed. We'll learn how to use a motor controller in the future to vary the speed.
Right
If we turn off the right motor and leave the left motor running, the chassis will turn to the right. To speed up this turn, the right motor can actually be told to go in reverse.
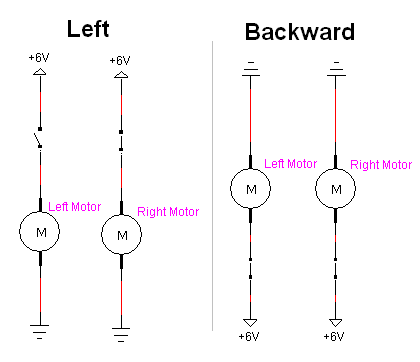
Left
Similarly, if we turn off the left motor and leave the right motor running, the chassis will turn to the left. Again, you can speed up this turning motion by actually telling the left motor to run backwards.
Backward
If we connect the power supply the opposite way to the motors, they will run exactly the same, but the motors will spin backwards instead of forwards.
The schematic at this point is purely oriented around connecting the two motors on the magician chassis to the power supply on the breadboard. The different configurations below give some examples for how you can connect the power supply to the motors, and the resulting effect on how the robot will move.
Schematic Specifics
Forward
When both motors are connected directly to the battery, the chassis moves forward at full speed. We'll learn how to use a motor controller in the future to vary the speed.
Right
If we turn off the right motor and leave the left motor running, the chassis will turn to the right. To speed up this turn, the right motor can actually be told to go in reverse.
Left
Similarly, if we turn off the left motor and leave the right motor running, the chassis will turn to the left. Again, you can speed up this turning motion by actually telling the left motor to run backwards.
Backward
If we connect the power supply the opposite way to the motors, they will run exactly the same, but the motors will spin backwards instead of forwards.