Project Info
Author: Chris
Difficulty: Medium-Hard
Time Invested: 10 Hours
Prerequisites:
Take a look at the above
tutorials before continuing
to read this tutorial.
Author: Chris
Difficulty: Medium-Hard
Time Invested: 10 Hours
Prerequisites:
Take a look at the above
tutorials before continuing
to read this tutorial.
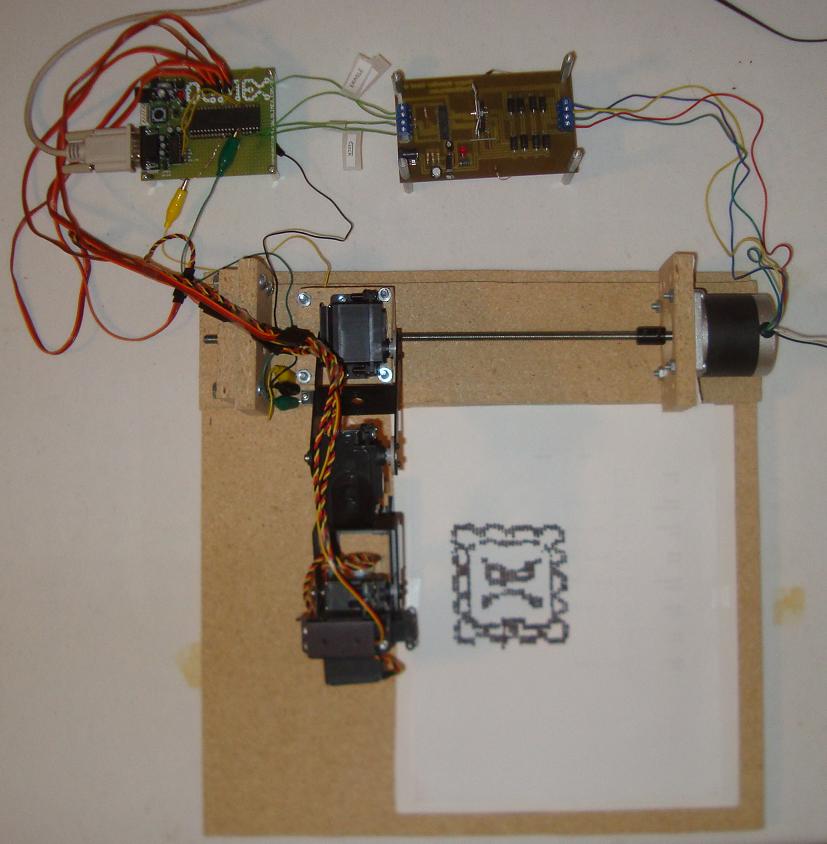
The Sharpie Dotifier uses 5 servo actuators to move the arm up, down and to grip objects. The robotic arm is on a wooden stage which is moved back and forth via a threaded rod. The stepper motor turns the threaded rod so that the stage moves back and forth. Because the motor moves in precise steps we can reliably track the movement back and forth and always know where the stage is.
Purpose & Overview of this project
The purpose of this project is to enhance The Wooden Menace project to something that is useful and intelligently controlled. This project should be able to grab a pen and dot out a picture sent to the PIC microcontroller via serial communication.
A lot of design and testing will be necessary as a stage and mount need to be measured and cut for the servo robotic arm, the stepper motor and the threaded rod. The stage and mount will be made from standard MDF from a hardware store.
A Few More Videos...
For those of you who can't wait to see more vids, here's a few links to some of The Sharpie Dotifier's other drawings:


