



Get started learning to build your own electronics by following our FREE online courses below!
Learn More »
Categories
- animatronics (12)
- apple (11)
- arduino (179)
- art (41)
- articles (121)
- artificial intelligence (11)
- automation (421)
- avr (205)
- bitcoin (3)
- breadboard (9)
- cameras (57)
- cars (26)
- cell phones (28)
- clothing mods (21)
- console mods (26)
- dangerous (94)
- desktop mods (24)
- embedded (5)
- flying things (54)
- fpga (22)
- gaming creations (108)
- interface (225)
- internet (17)
- laptop mods (6)
- lasers (22)
- linux (7)
- magnetic (3)
- medical (12)
- microcontrollers (51)
- misc projects (152)
- msp (12)
- music (124)
- pic (90)
- projects (23)
- pyroedu (76)
- raspberry pi (26)
- robots (312)
- security (36)
- sensors (307)
- software (200)
- solar (19)
- stamp (9)
- tools (149)
- tutorials (98)
- Uncategorized (45)
- usb (44)
- wireless (256)
Sponsors
Build Like A Pyro!
Find many of the parts used on this site at our favorite online electronics shop

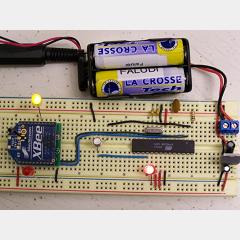
Wireless Arduino Programming
Posted August 14, 2008 by Chris
In what is probably a fairly obvious and easy thing to do with Xbee, we have the arduino wireless programmer. This is a pretty cool idea because it clears up the mess of wires around your project and is very simple integrated into your project.
2 Responses to “Wireless Arduino Programming”
Leave a Reply
Currently Hot
Advanced VGA On A UP2
make even cooler stuff appear on your monitor
The Accelerometer
take input from an accelerometer and show some ouput
L298 Stepper Motor Control
control a stepper motor with the l298 (l298hn)
Creating VGA With VHDL
create vga signals with vhdl and the up2 board
The Music Equalizer Display
make your own music equalizer display with a pic
Animatronics

Recent Articles
Arduino DDS Shield
build your own arduino based analog signal generator
A Digital Multimeter In Review (Tenma 72-7735)
learn about your typical digital multimeter in review
The PIC Annoy PCB
build something to annoy your co-workers
Automate Your Life With Cron
learn how to use cron for computer automation
Web Scraping For Weather Updates
learn how to use php to scrape the web
Creating A Web Server In Linux
learn how to make a lamp web server in linux
Stepper Motor Control With A stepRocker TMCM-1110
learn how a commercial stepper motor controller works
Arduino To PIC Wireless Proximity Motor Control
control a motor with a distance sensor wirelessly
PIC to Arduino Wireless Communication via XBee
use xbee to make a pic wirelessly talk to an arduino
Motor Control via Infrared Distance Sensor
control a motor simply by waving your hand


November 22nd, 2010 at 10:07 am
MAKE EVERYTHING NEGITIVE ON THE INTERNET ABOUT YOUR COMPANY GO AWAY! PERMENANTLY BURRY NEGITIVE INFORMATION ABOUT YOUR COMPANY
February 23rd, 2012 at 12:29 pm
ÿþT